Slowly inching towards the Blackbird2 on the Oculus Rift DK2.
Right now, I have the ancient Logilink video capture card running on Windows 10 and found a software that is old enough to be compatible with it but young enough to run on Windows 10.
It installed the DirectPlay on Windows10, so that’s the tribute to old tech, I guess.
So I get the video on my desktop now, have updated the Nvidia driver 358.87 for my GTX980 and the lastest Oculus Rift driver (v8.0).
What we get is here:
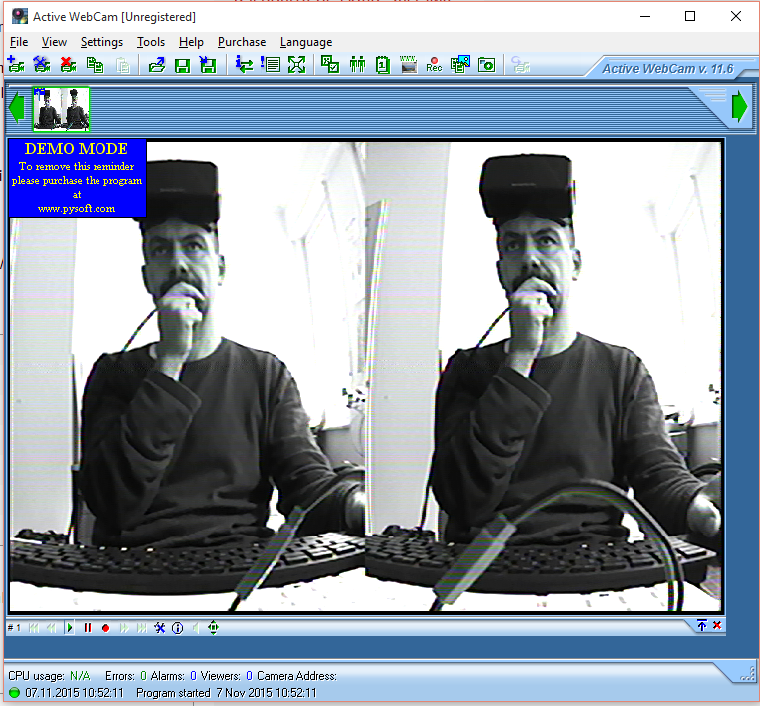
As you can see, it’s black and white somehow. The capture says it sees 525 (PAL60) or 625 (PAL_N), with the latter setting, I also get some sort of colors but they change rapidly and are mostly false…
I can also put the video on full screen, but it seems that with the latest drivers for the Oculus, I can’t use the DK2 as second output display, so I don’t know how to put the camera video into the DK2. Clearly, more research needed…