I always love to obey to minimalism and I always love to construct stuff with a minimal amount of material and complexity. Of course, the question is then how replicable, durable and maintainable the result is.
In the present case it became obvious, that at some point in time, Trashbot would need to have an additional degree of freedom on his foot, namely an ankle that allows him to lean forward. The present prototype is acutally from August last year. But now I’m revisiting my designs as Trashbot recently got the long awaited additional hip servos and the logical next step is to add the ankle servos.
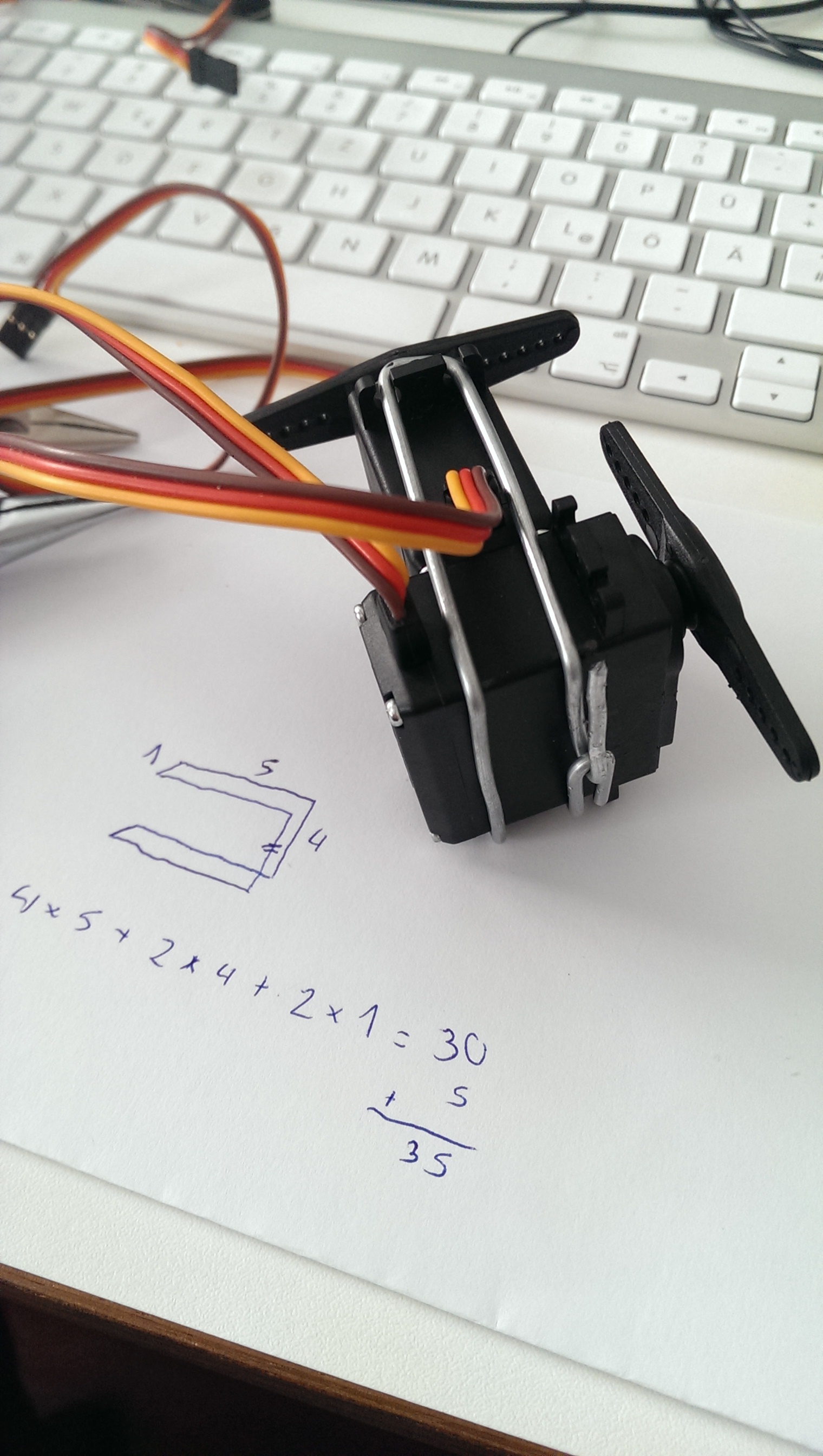
So let’s start with the layout:
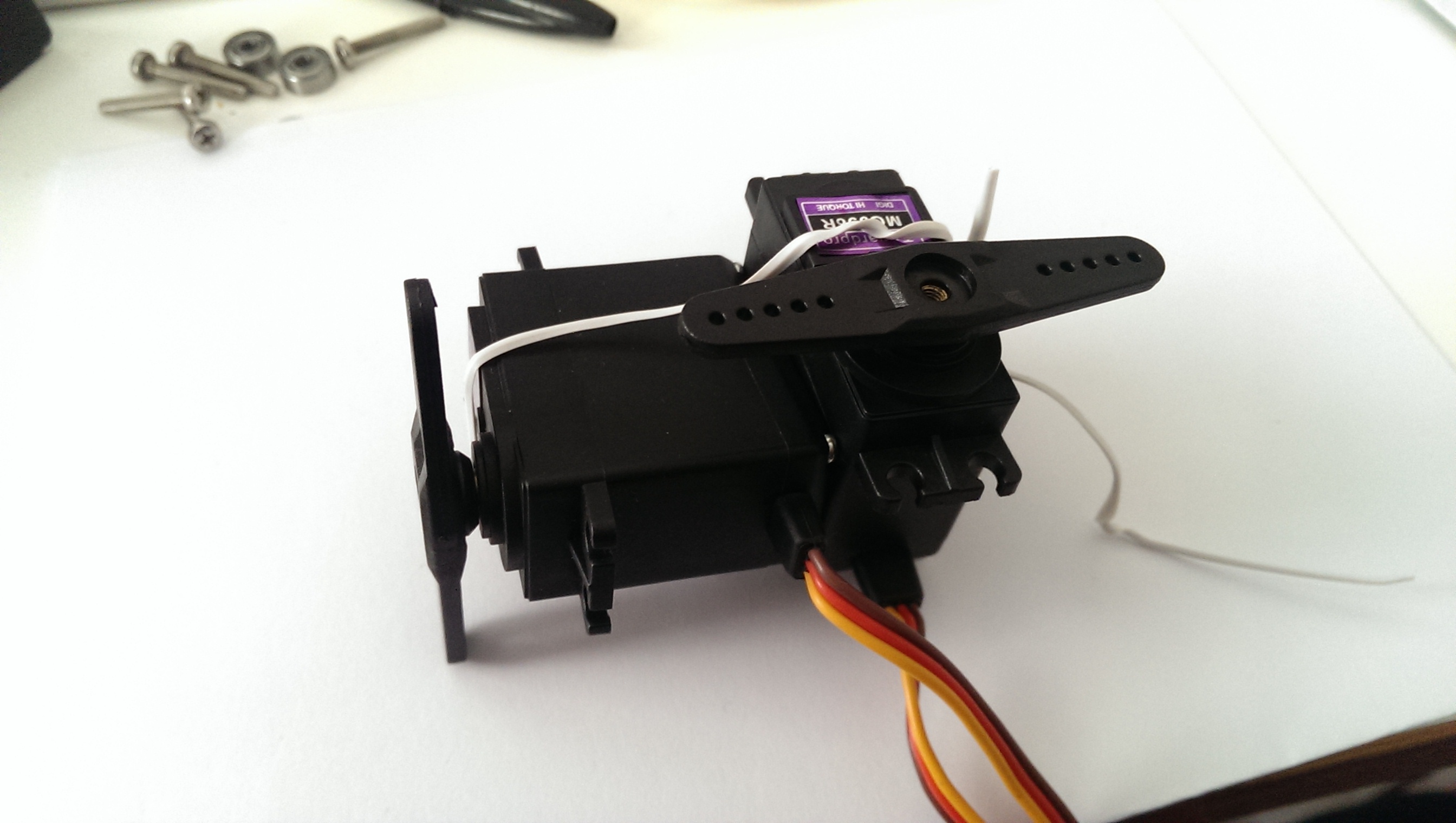
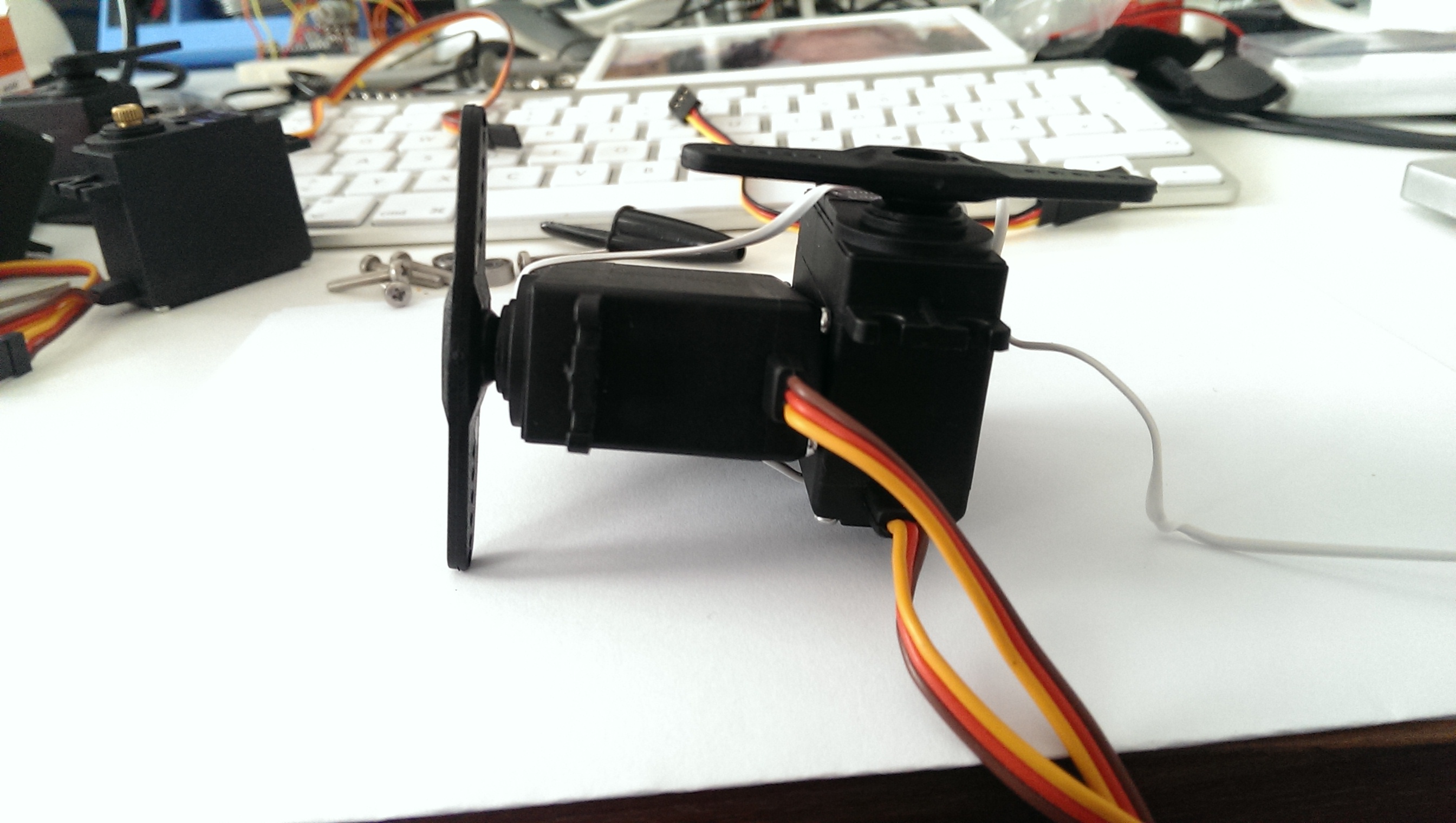
this leaves the foot flat and has the tilt pretty flat and close to the ground, whereas the “lean forward” ankle is positioned similar to the human foot at the end. also, both axes are on the same plane.
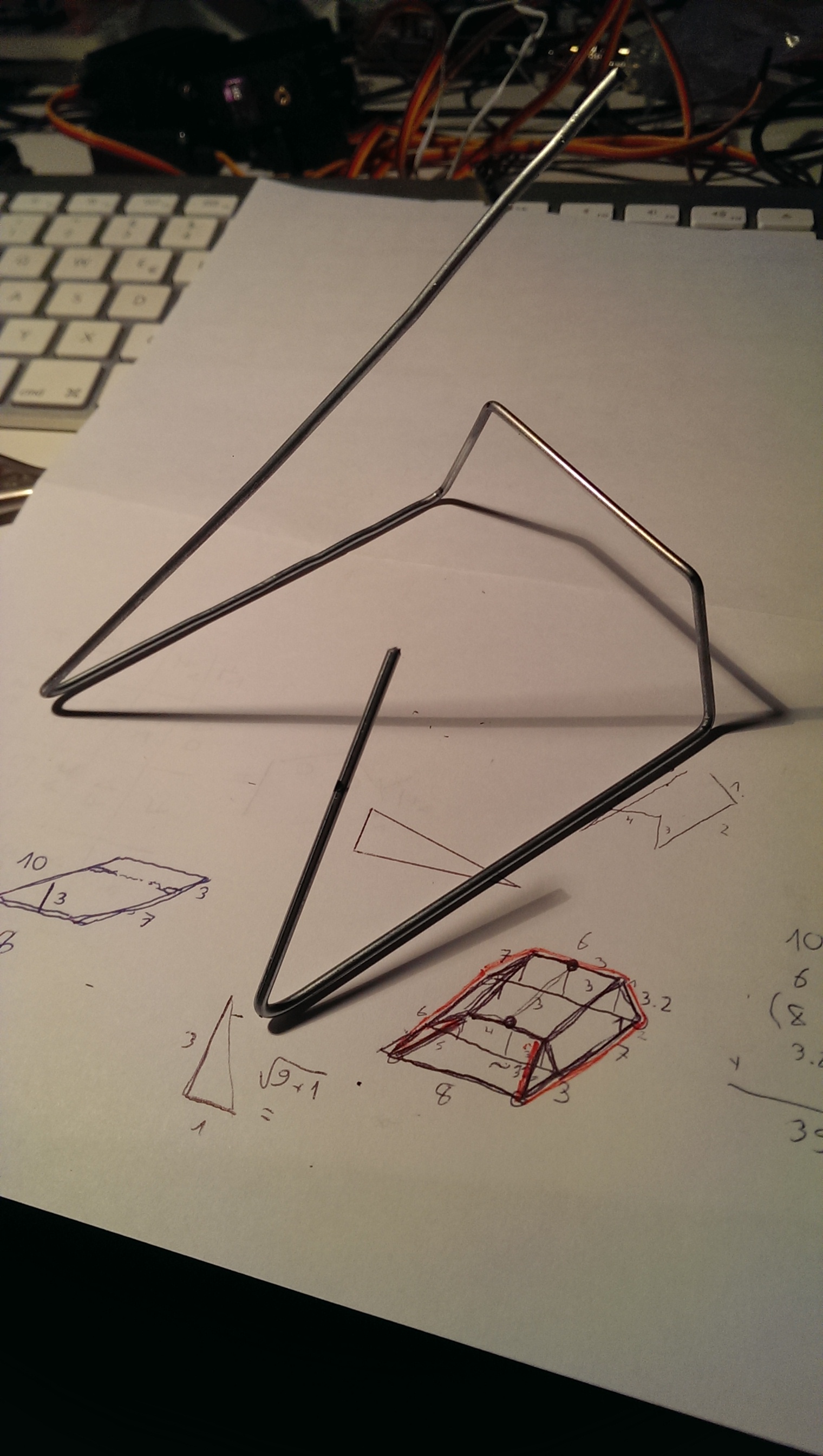
so let’s start with the straightened wire from the coat hanger:
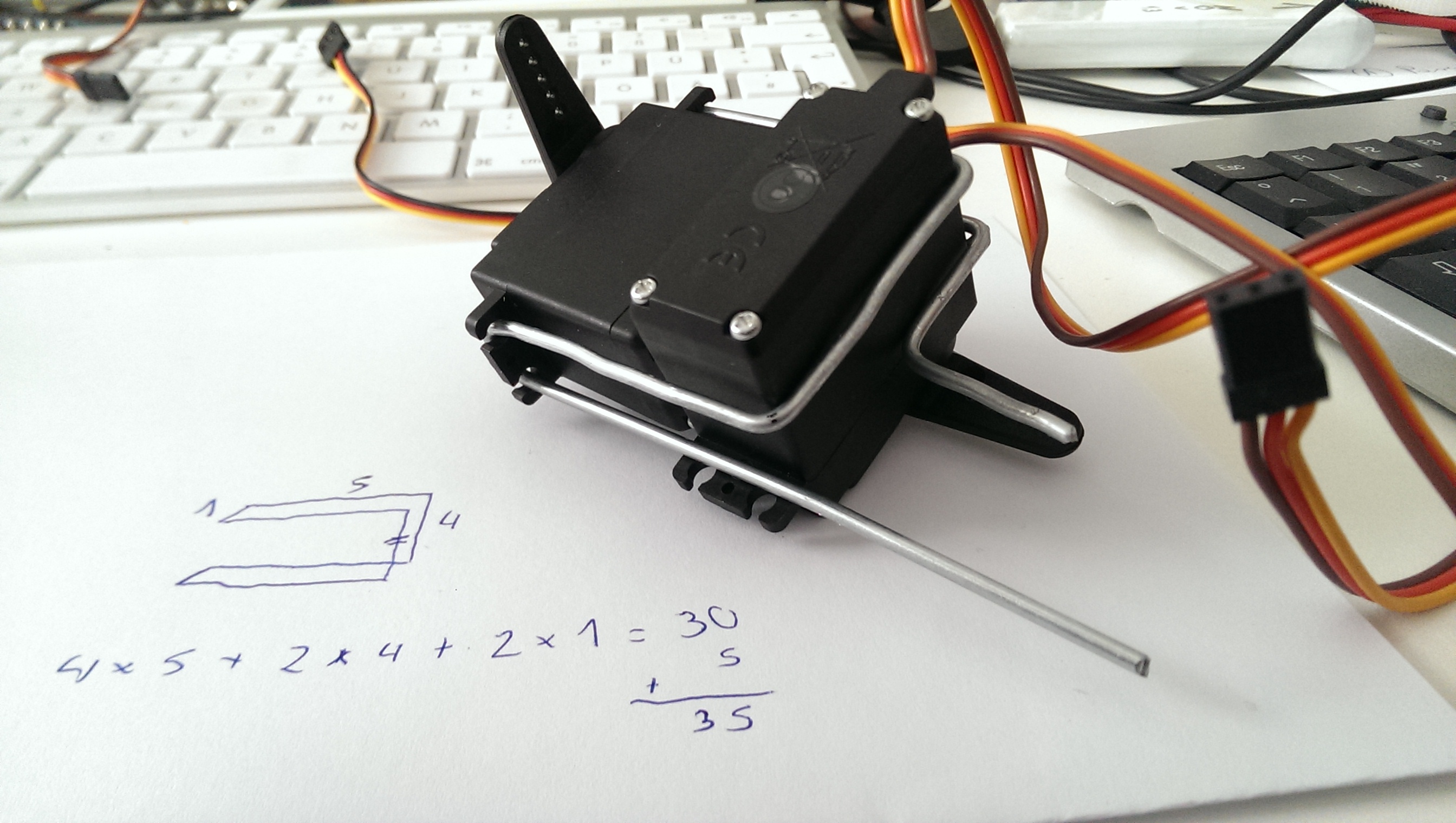
It’s very important to have a good idea of the wire plot in your head, visualise it and then calculate the length of the with adequately. Problematic is the additional length that you need for the angles. I worked with pliers here so the angles are quite soft, with different tools one could obtain sharper angles.
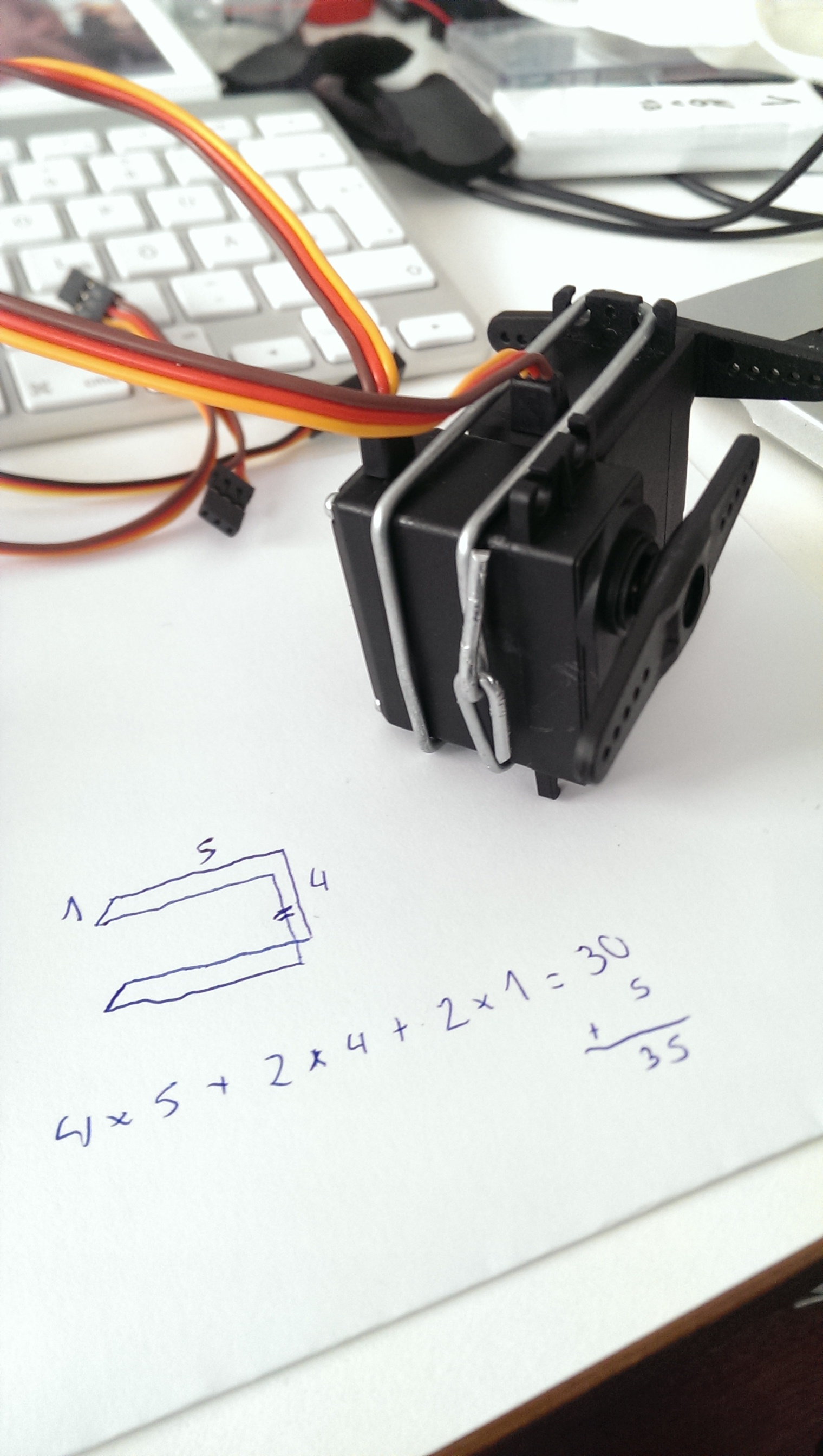
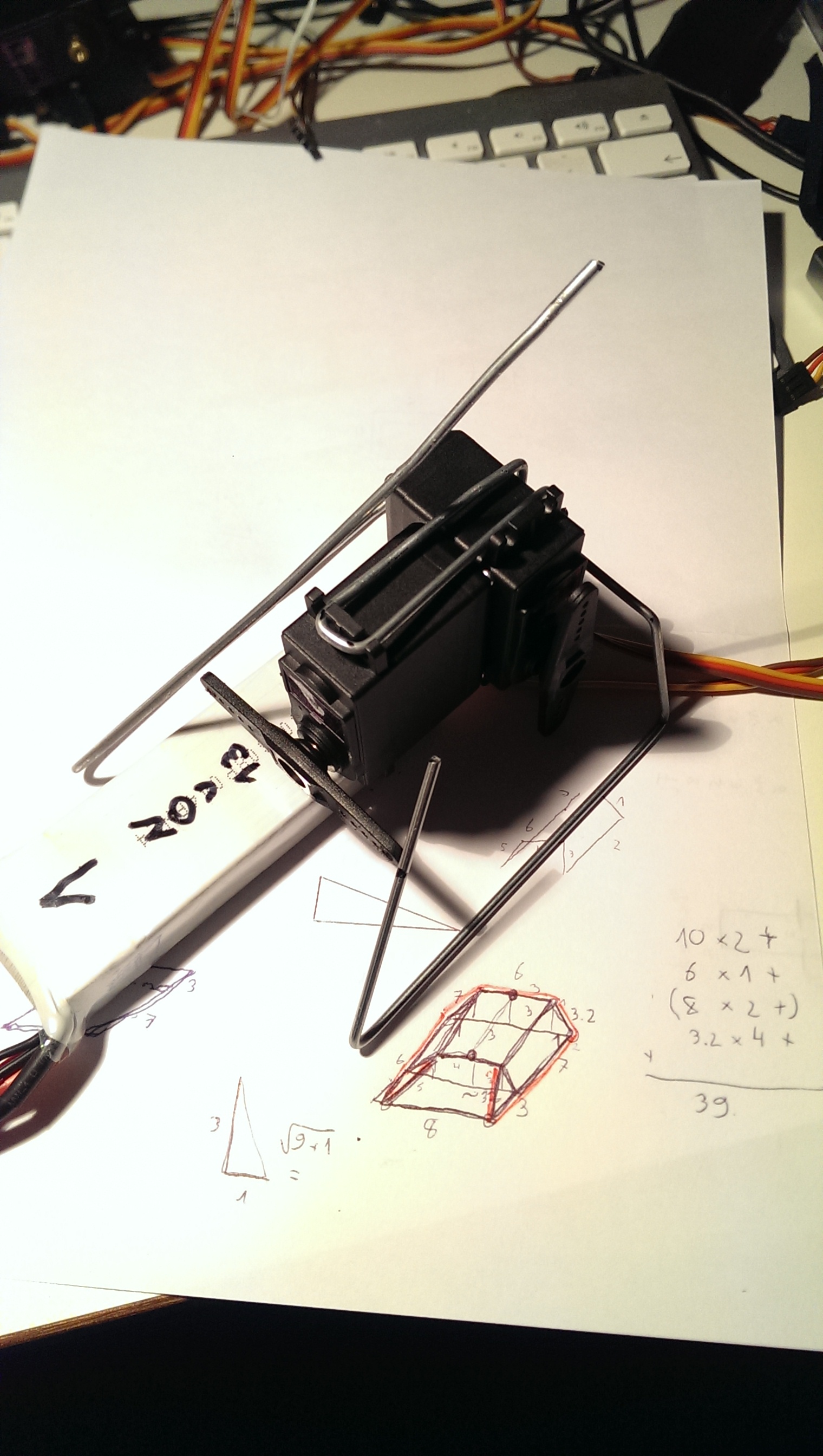
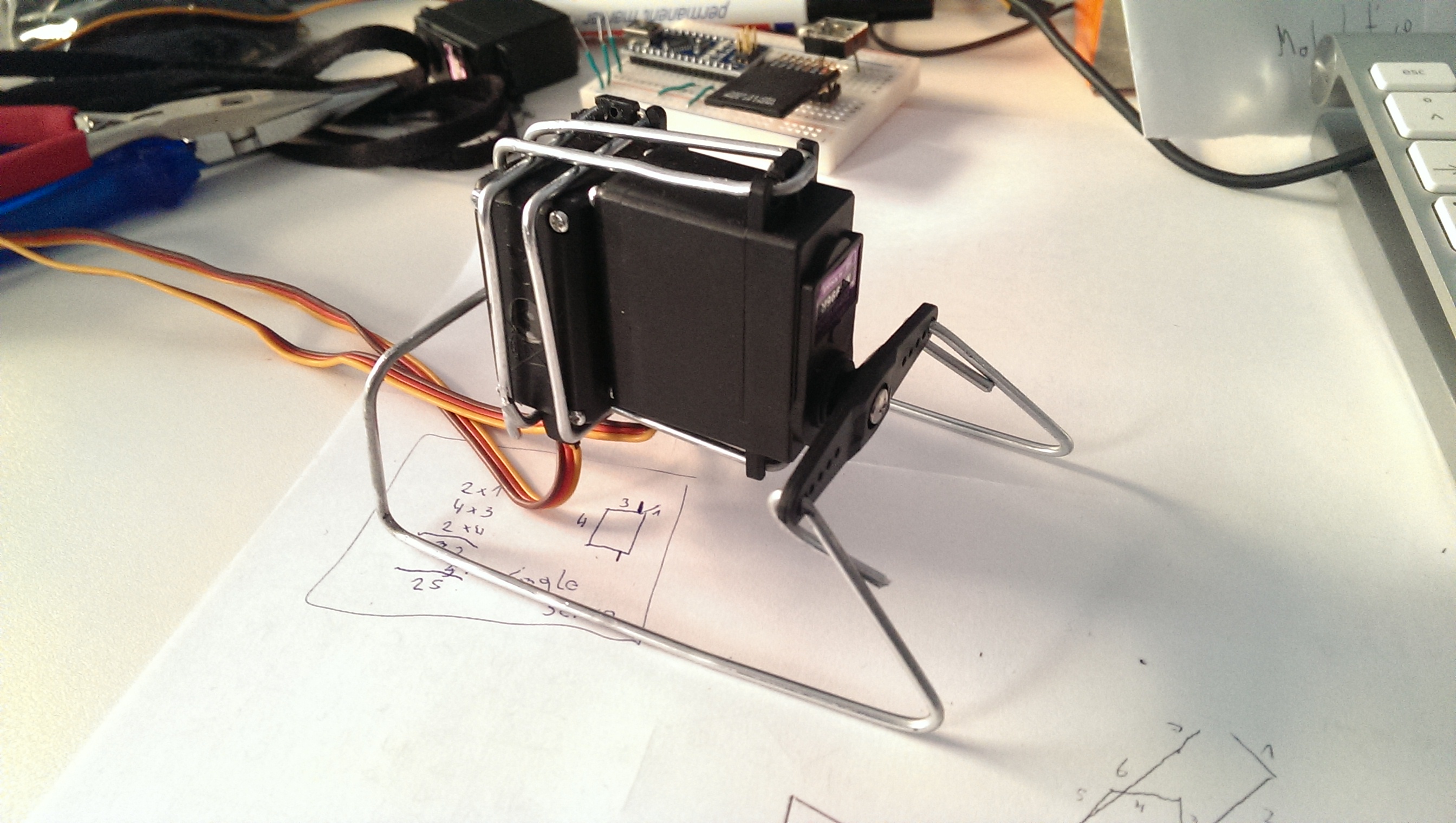
Now that I had the two servos connected to each other, I could start designing the actual foot. The trick is that it is lifting the tilt servo abot the gound so that it can move freely while the foot is standin firmly on the ground.
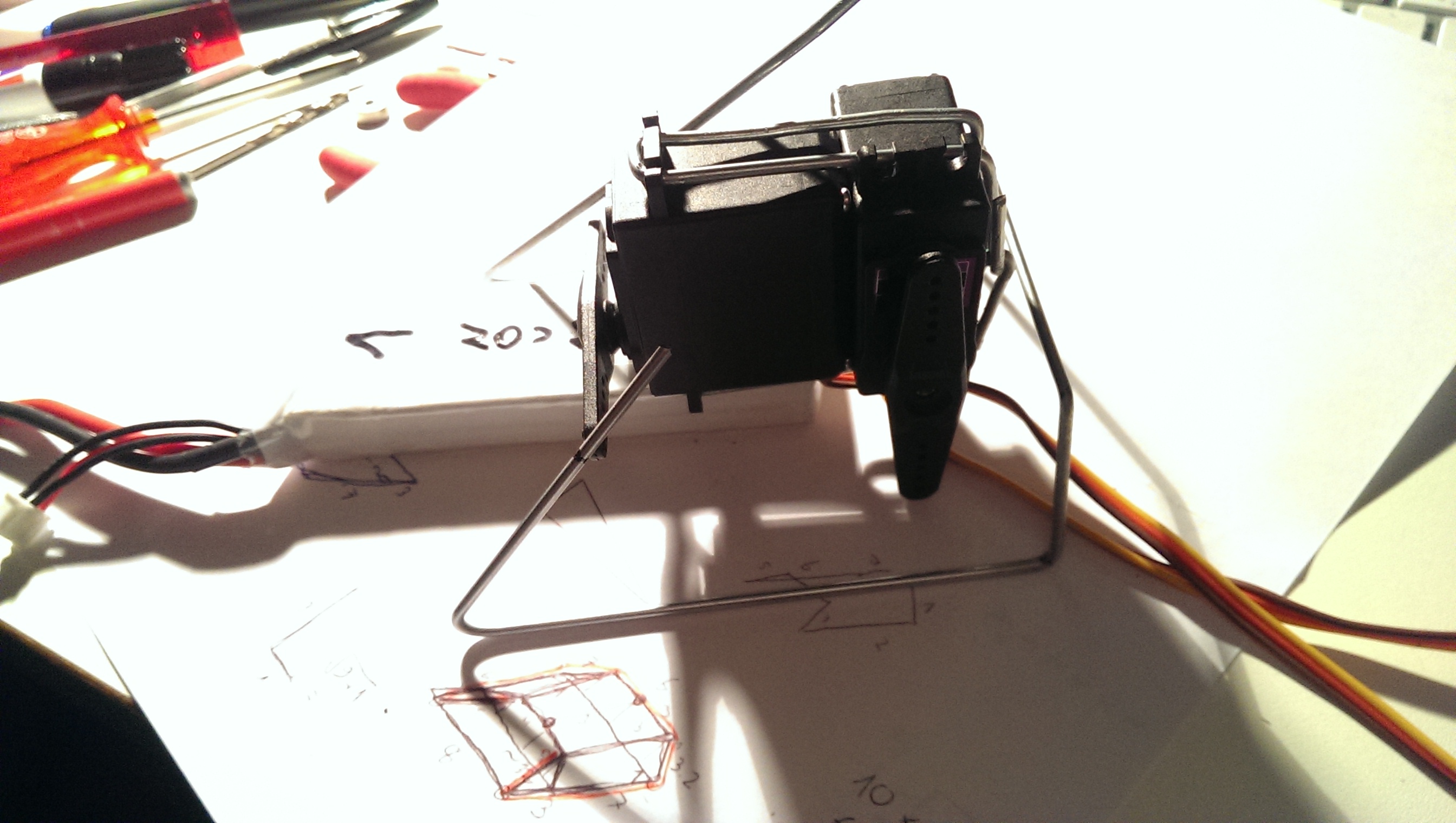
Yeah, and then here’s the final result. the important thing is to connect the foot on two sides to the servo. That is in my experience always the problem with servo brackets that you design yourself.
Here’s a final video of the construction moving the servos:

The only reason I came here is to see it working. You have step-by-step instructions in the webpage. Those instructions were then done again in the video, and in the end, no video if it working. Does it work?
yes, technically, it works, i can let the servos move. however, the foot is a bit wobbly, especially when you add moving weight (like the robot walking). this could be fixed by adding wires from one side to the other and possibly soldering the joints. secondly, the angle on the backside of the tilt servo is moving too much, this would need a fix by adding two “waves” left and right from it. finally, i’d need to add some rubber to the lower side of the feet to prevent the bot from sliding.