I always love to obey to minimalism and I always love to construct stuff with a minimal amount of material and complexity. Of course, the question is then how replicable, durable and maintainable the result is.
In the present case it became obvious, that at some point in time, Trashbot would need to have an additional degree of freedom on his foot, namely an ankle that allows him to lean forward. The present prototype is acutally from August last year. But now I’m revisiting my designs as Trashbot recently got the long awaited additional hip servos and the logical next step is to add the ankle servos.
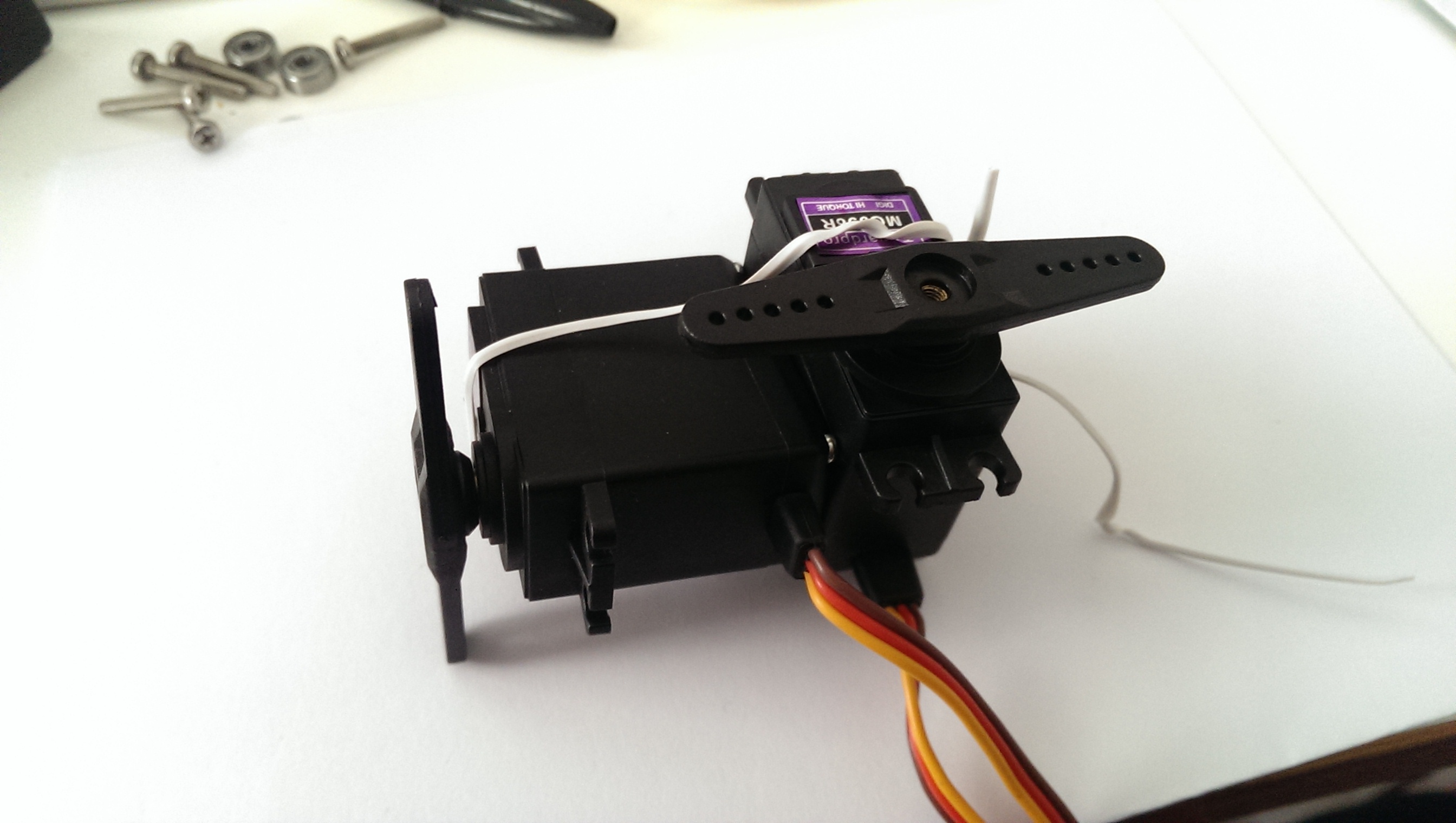
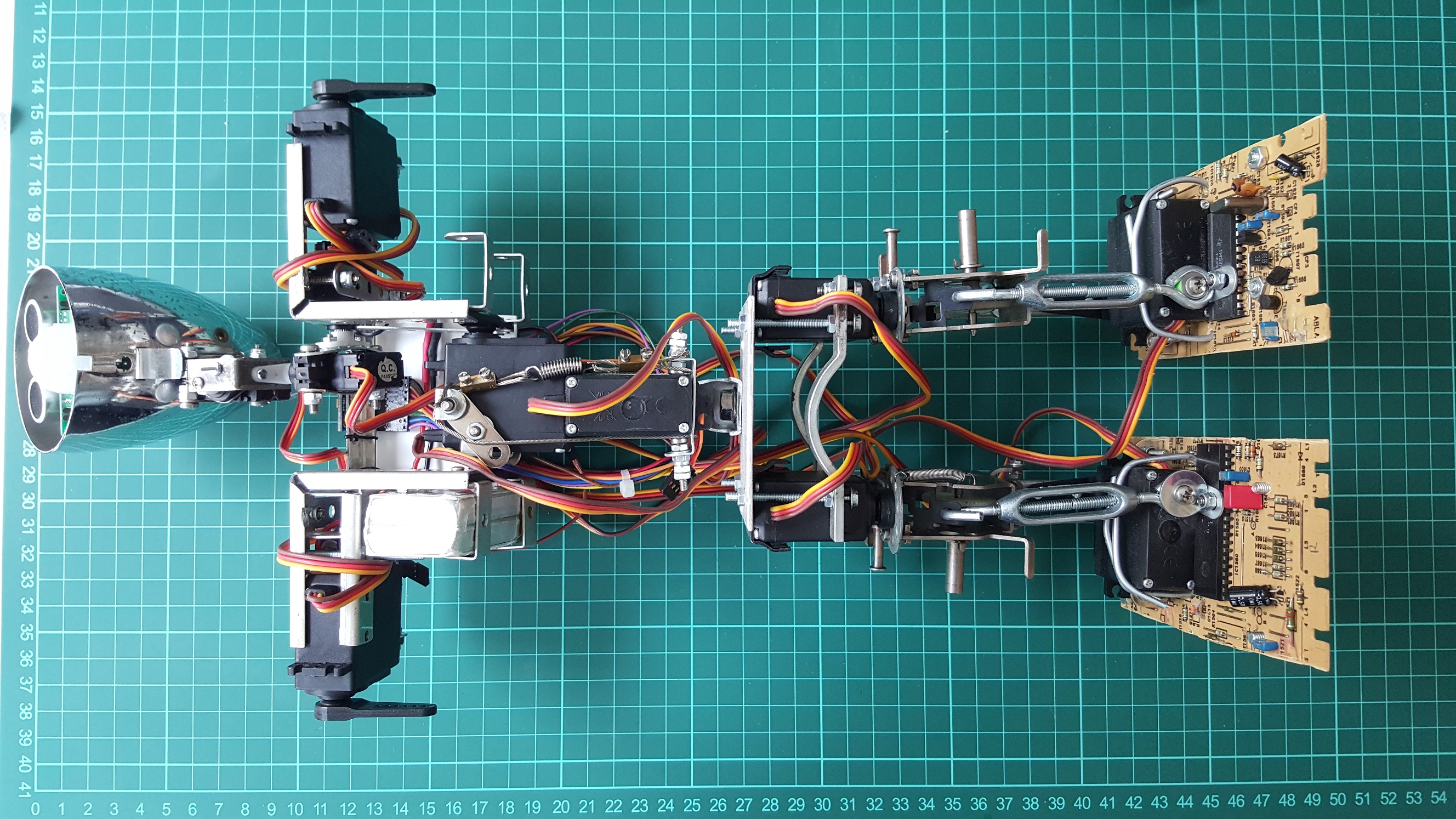
So let’s start with the layout: