i wanted to reuse the neck construction from my former trashbots:

neck with the bike lamp shade
unfortunately, i had to remove the bike lamp because the stripped minoru camera is broader (about 9cm) so i had to find a lamp head where it fits in.
the neck is constructed from three cs-929mg metal gear servos operating at 4.8 to 6.0 volts, so the question is which of the step down converters to use. the one for the raspberry pi is outputting 5.29 volts the other is outputting 6.2. the former is meant for electronics, the latter for the servos. so i’m not really sure, i should allow the ubec for the pi to power the neck servors that induce voltage swings during operation.
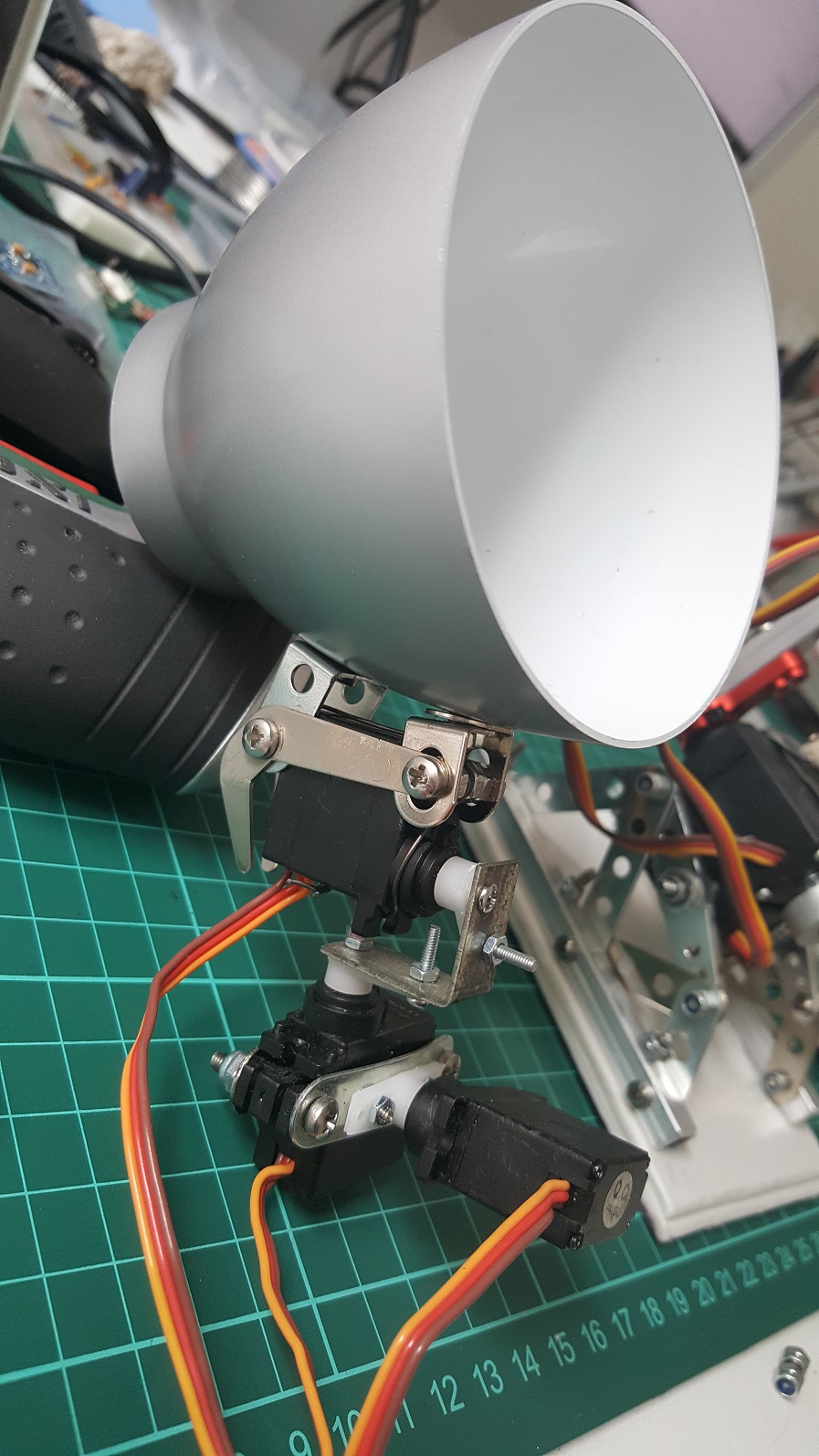
so, here’s the neck sans the bike lamp shade the older trashbots wore:
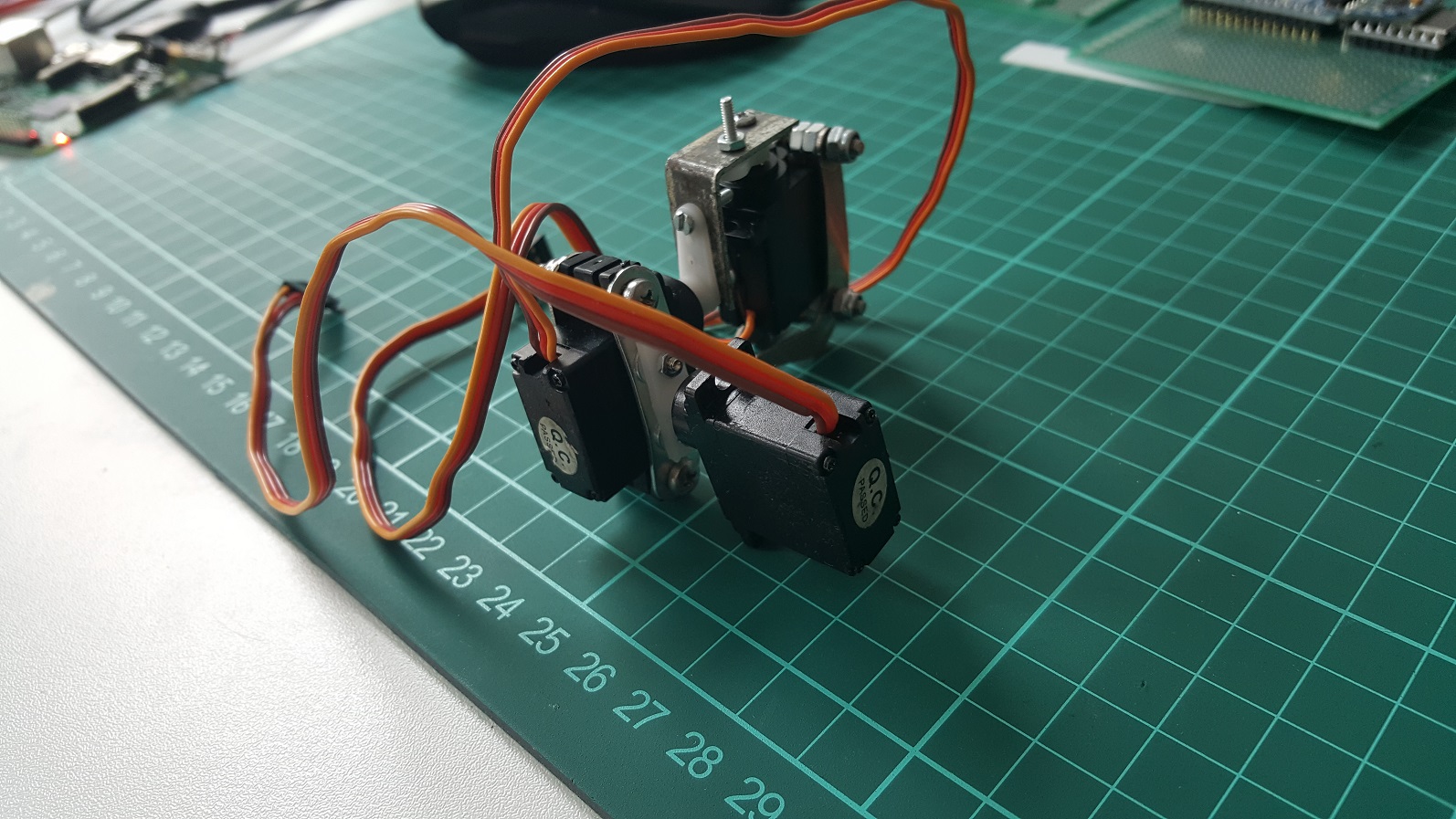
trashbot 3DoF neck
i added two metal Us to the top servo to match the new lamp shade’s form:
extended neck adapting to lamp shade
the corresponding holes:
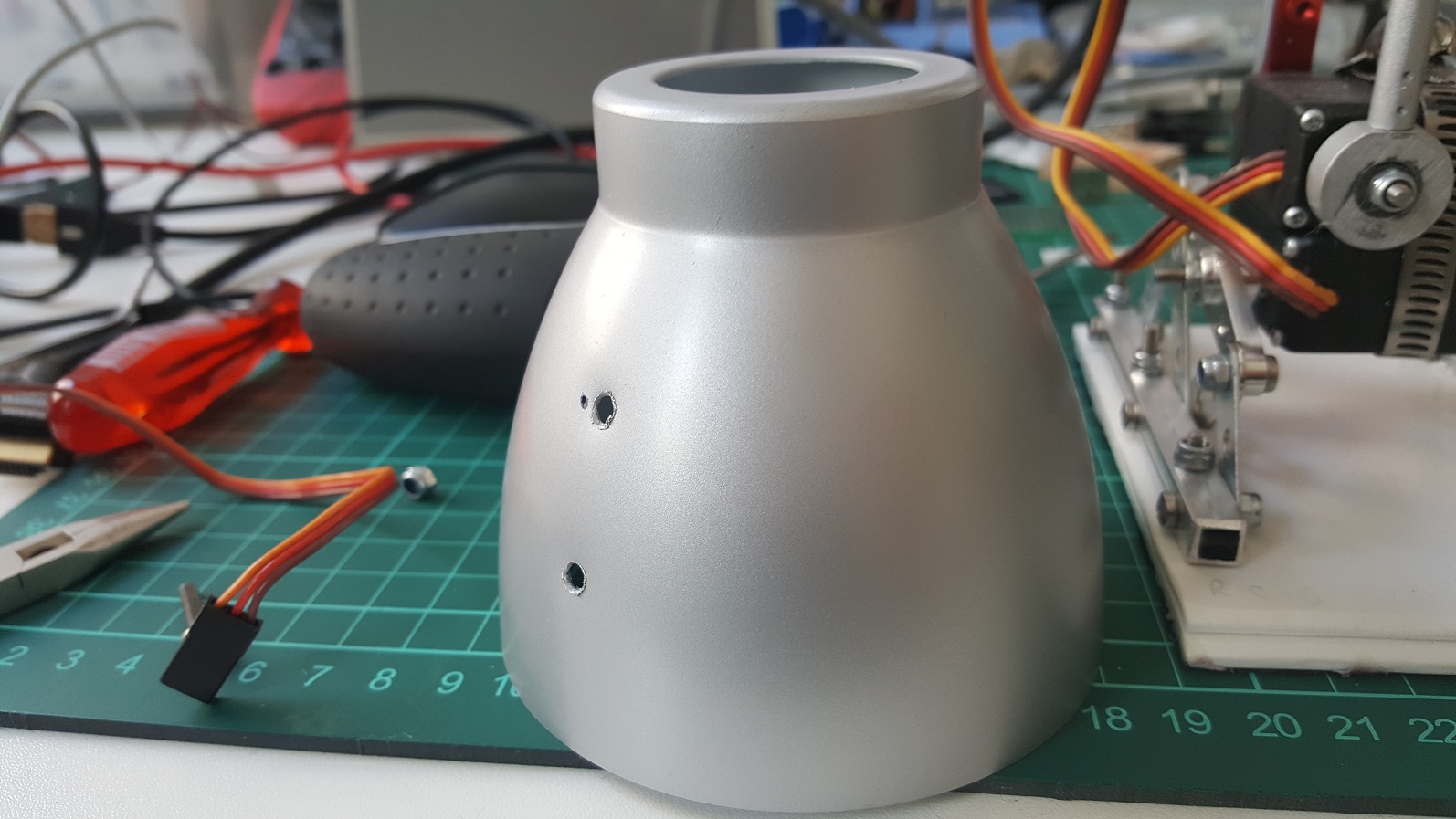
lamp shade holes
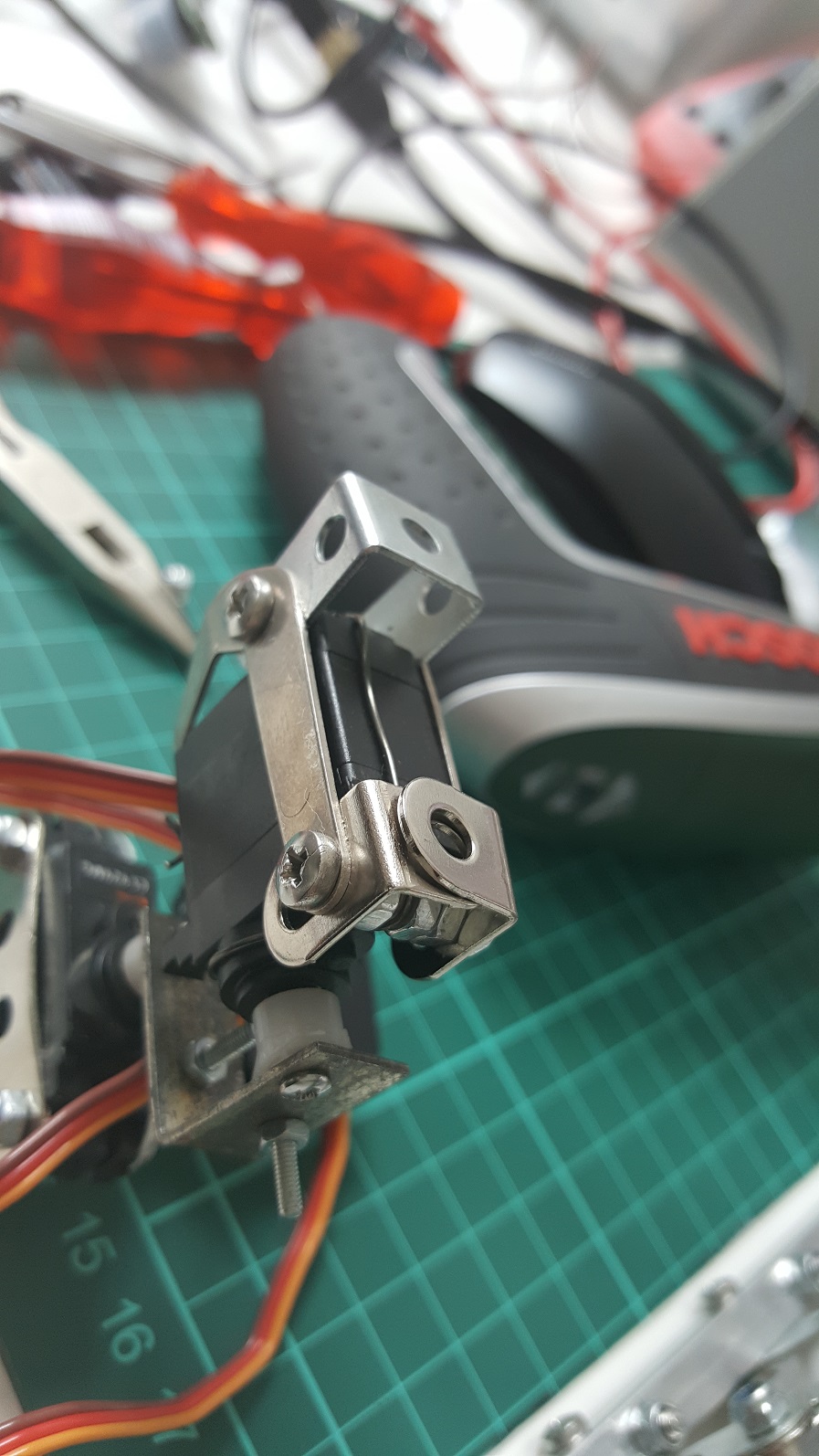
and the connection, elegant, yet robust:
head and neck
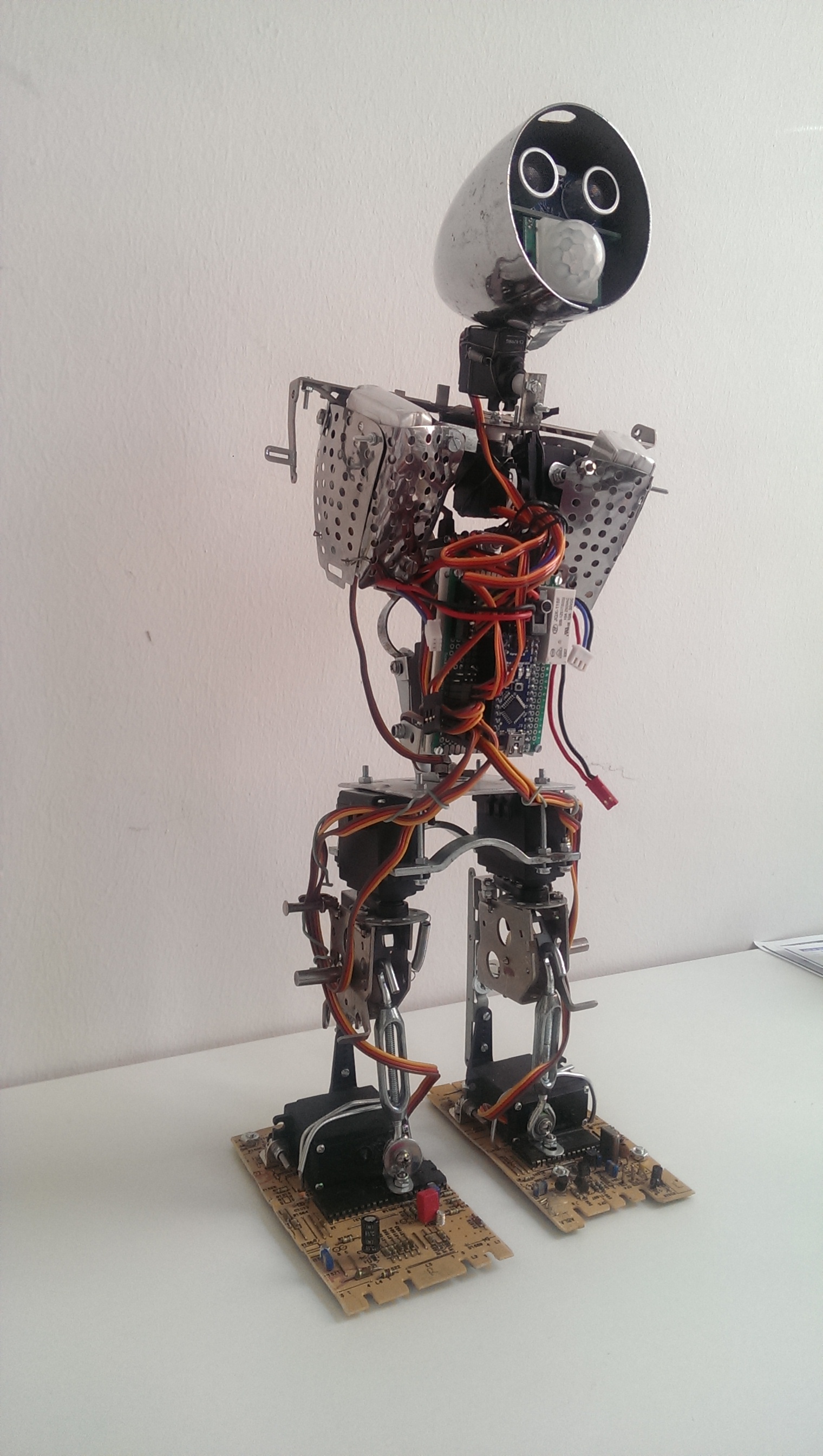
finally with the minoru 3d webcam inserted and connected to trashbot:
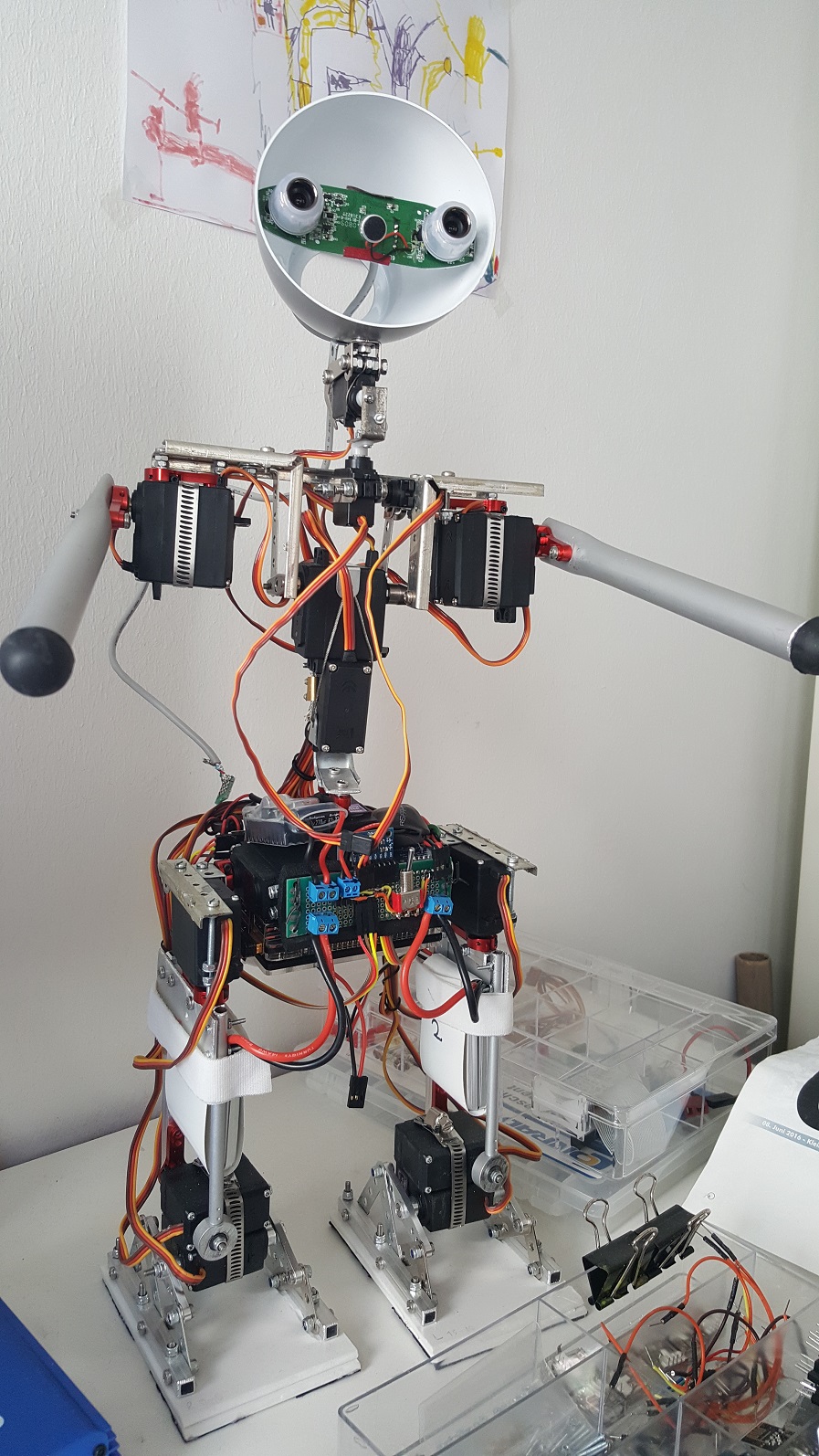
trashbot 6 with the new head
next stop: adding a controller to the neck servos so that the head is not tilting when the robot is moving. i plan to add an arduino mini pro, ideally right in the head so that i can spare cables to the trunk. furthermore i’d like to program the arduino via the pi, a lot to learn!