I’ve been working on Trashbot for quite a while now, but the basic gait mechanism is still the same as in version one. The hips’ movements and the distance between the legs define the possible step length. This is annoying since the robot is rather tall and you’d expect that he’ll walk a bit faster than he actually does. However, moving faster induces stronger vibrations in the skeleton and makes him fall much easier.
Also, the upper part of the body will tilt “stronger” when he’s leaning to one side to move the other leg, which is again adding to the instability. The gimbal mechanism to counter balance that is re-active, not pre-emptive. And of course, the weight on the upper part is also reducing the “re-activity”.
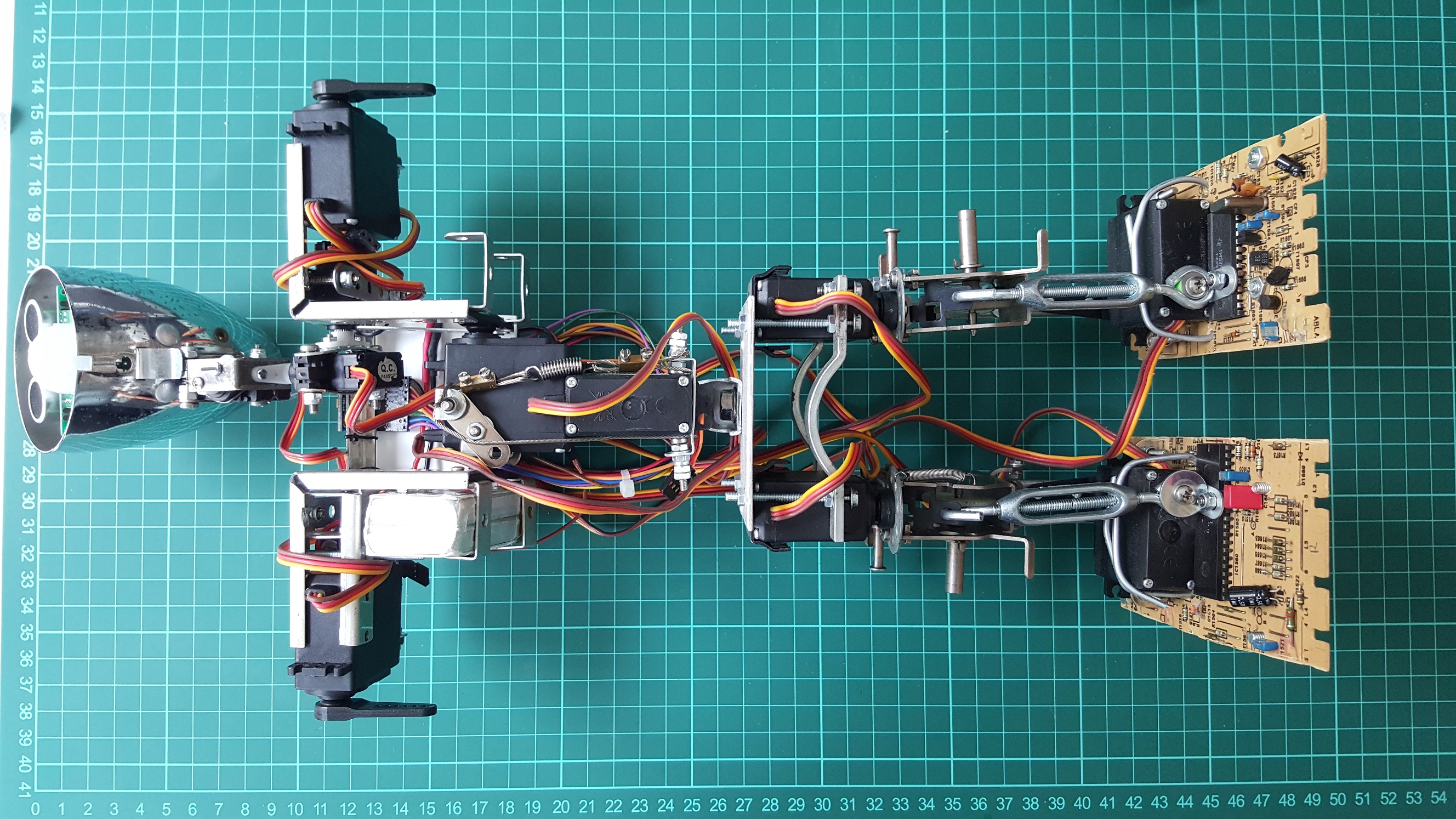
After thinking a while I came to the conclusion that I need to add at least two servos on the hip. This time, I documented my work on video, not so much on photos:
The next part in this series will cover experiments with different movements to check out the new geometry and to understand whether we can improve the gait without adding new servos to the feet for the counter movement of the hips.
