I always wanted the Omnibot to be able to actually grab and lift objects. So I started with the arms and recycled the 2 DoF shoulder servo pack from Trashbot.
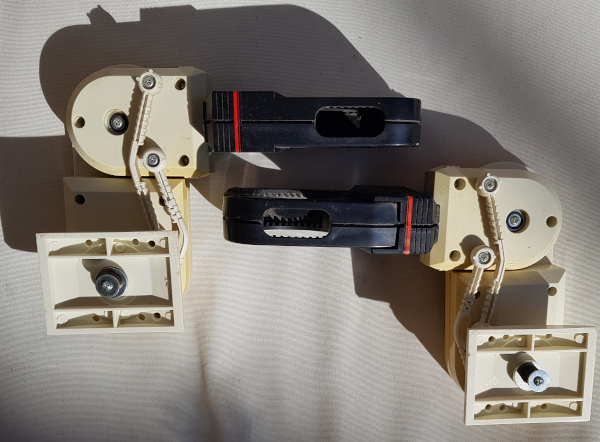
The goal was to get the should parts replaced in a lean looking way. However, the original arms only move forward but not sideways, i.e. Omnibot cannot hug. Adding a second degree of freedom will thus inevitably broaden its shoulders:
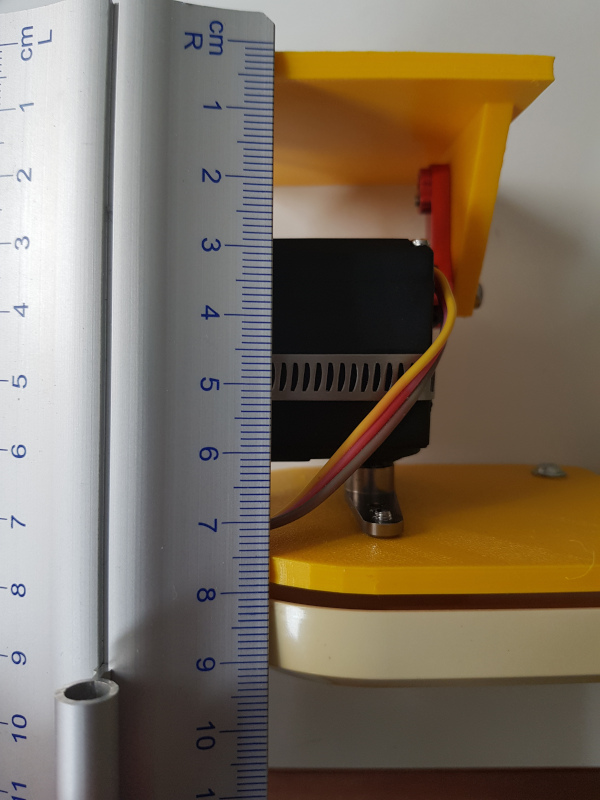
One trick was to hide the hugging servo within the body as good as possible. A next iteration could also hide the lifting servo a bit in the upper arm. For the current version, I chose to add it on a newly designed base plate that is at least slimmer than the inner should cover (compare it to the underarm):
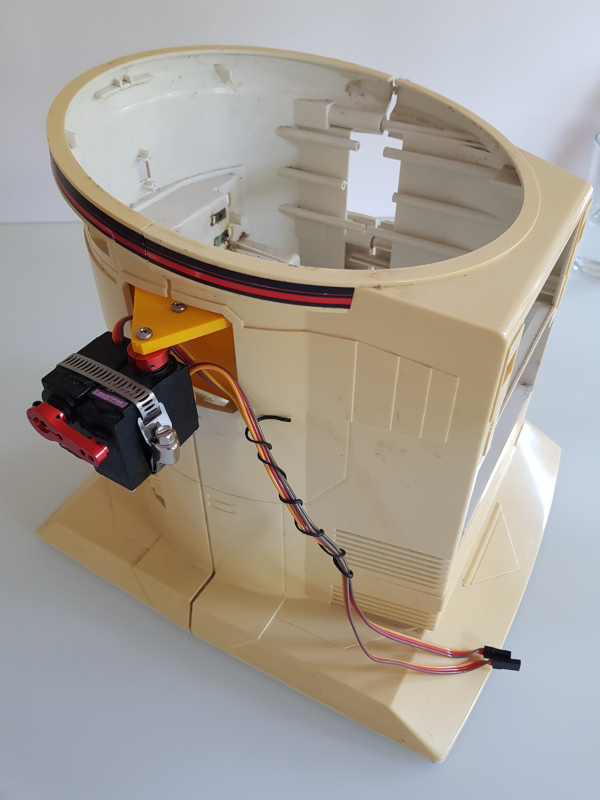
Here’s an earler version of the design, before I moved the should into the corpus:
Software wise, I had to slow down the servo speed as otherwise Omnibot would move like this:
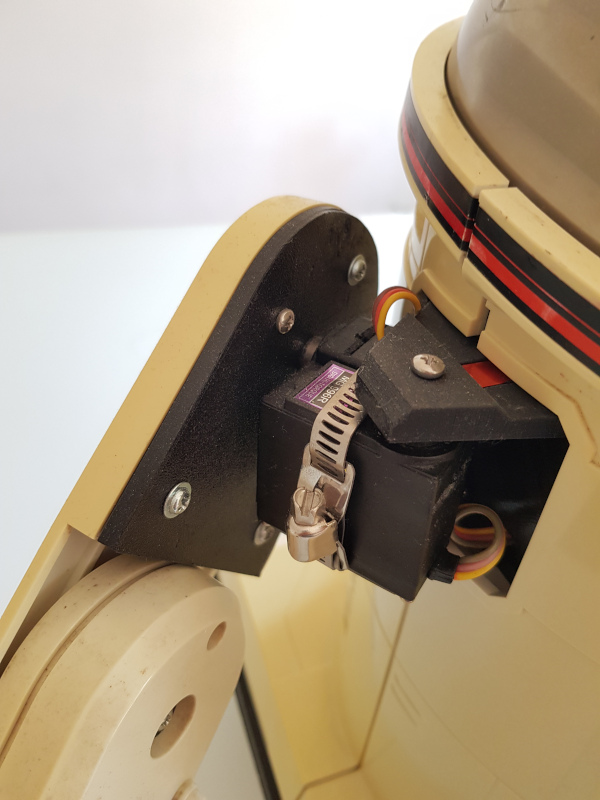
The final result are the two arms, each controlled by a thumbstick of the Bluetooth game controller. I added the Adafruit servo HAT to the stack that was using the motor stack before:
As usual, I’ve uploaded the two 3d files (.STL) on thingiverse, let me know, when you’re trying these out!
One of the things that are not making me happy is that Omnibot’s belly is to bold that it can’t close the arms and the arms are so short that they can’t lift anything that is in front of it. Fixing these two “bugs” would mean a complete redesign of the arms, I fear.
