i just had to buy the power functions for lego. my sons were not happy that i had to slaughter one RC car to implant a little arduino brain, so i decided to buy the IR remote control two motors and a servo.
the first little thing i had to build was kind of a standard remote controlled car to get the boys started with it.
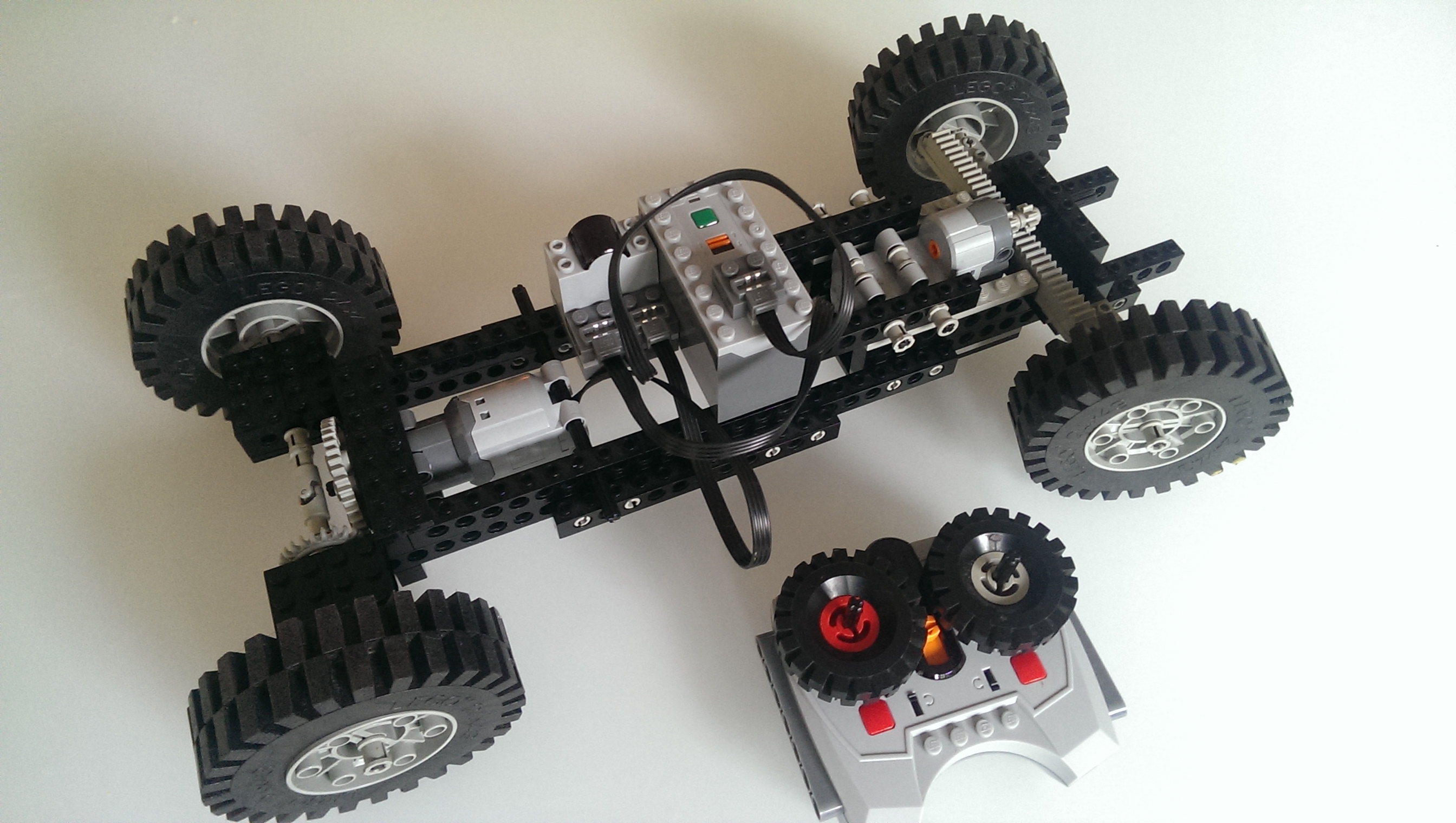
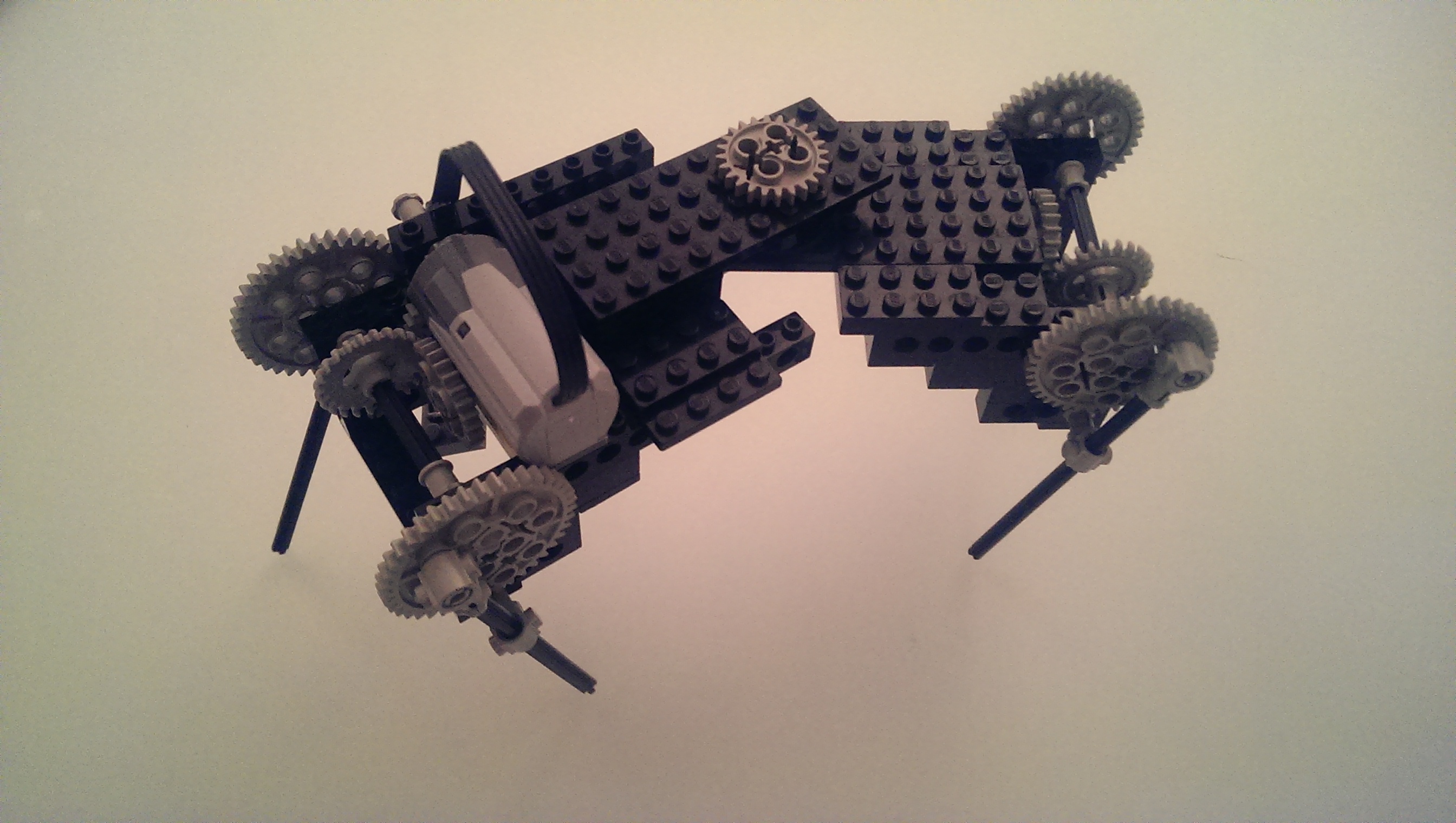
turns out that the car can actually go quite fast and that the steering servo can quite keep up with it. with the other motor i built a quadruped that i still had in mind from my childhood and wanted to see how the kids react to it. here’s the first working version:
the boys really like it and although there’s no head and tail they clearly perceive it as an animal.
it actually walks really nicely although the legs on each side walk in sync. there’s probably room for improvement. however, i actually want to build the servo into the spine first so that the bot can walk in circles.