as you know i love to design minimalistic mechanics and always try to simplify my previous designs. many of the things in trashbot 6 have been redesign to reduce weight and the number of parts.
one study of reducing complexity was the robot foot made from two servos and coat hanger wire and it actually received quite some attention.
with the progress made on trashbot 6, i also wanted to have a compact, yet lightweight way of connecting to parts with two servos so that these two parts could move in two dimension: the shoulders and the feet.
ideally, the two dimensions / rotation points are very close to each other so that this “cluster” acts like a spherically moveable joint so to speak.
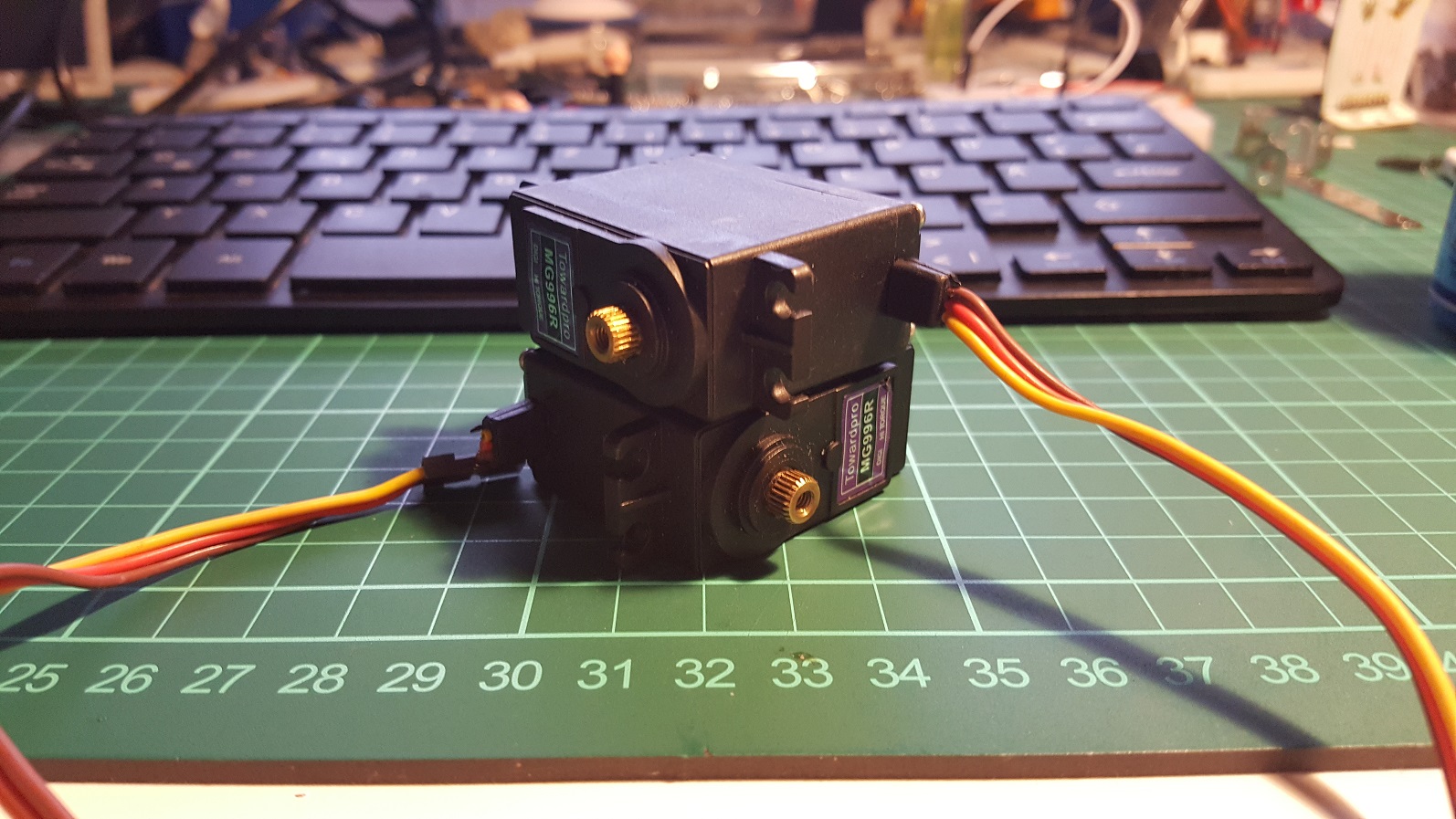
orienting two servos for 2 DoF
next it’s important to give the servo arms enough space so that they can move freely. this doesn’t work if we keep the plastic extensions for keeping the screws. we can clip them off
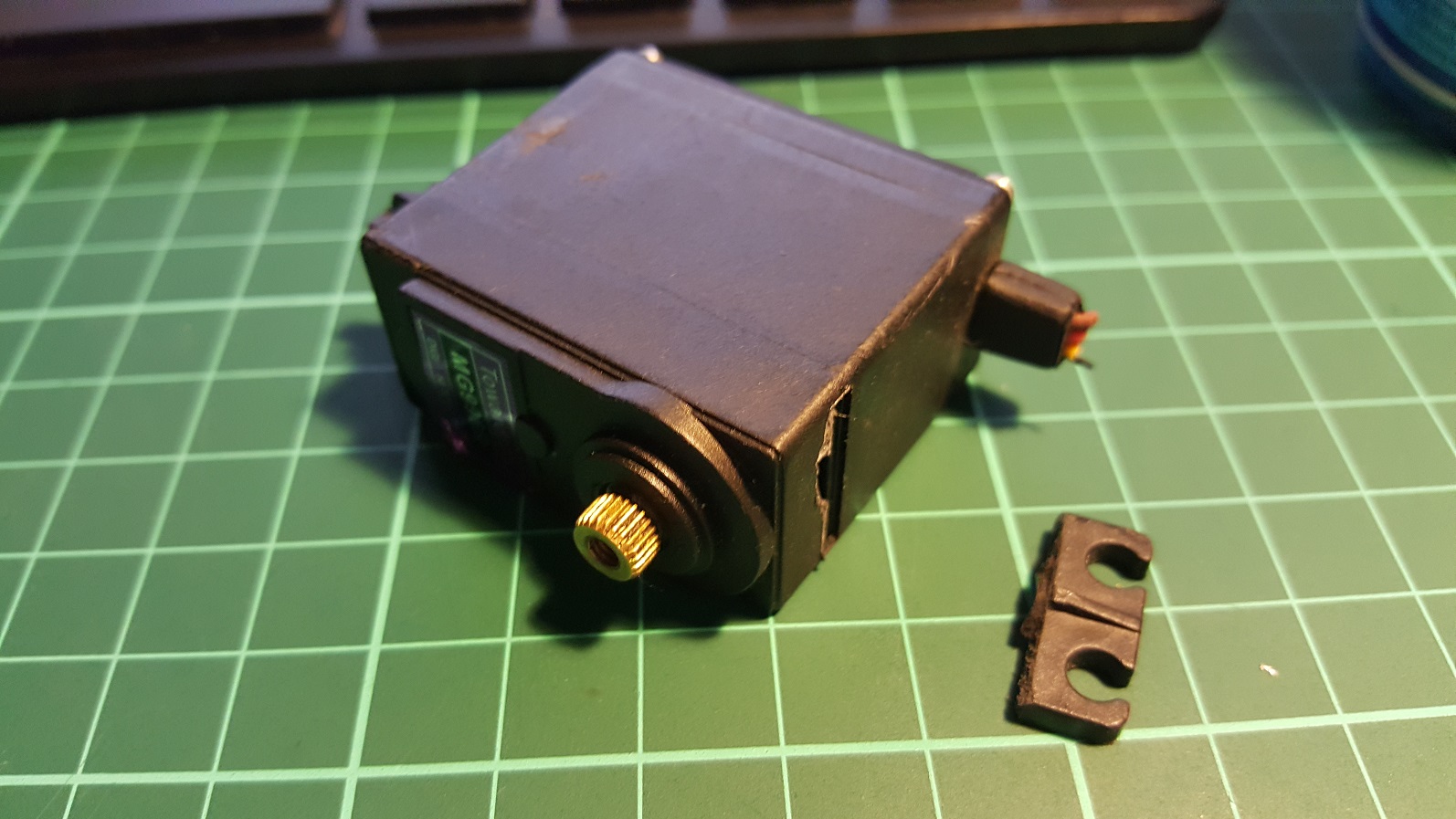
screw holders off
one of the best tricks (i think!) is now attach the two servos to each other using a…
…HOSE CLAMP:

cheap and light weight servo “glue”
and this is how it looks like:
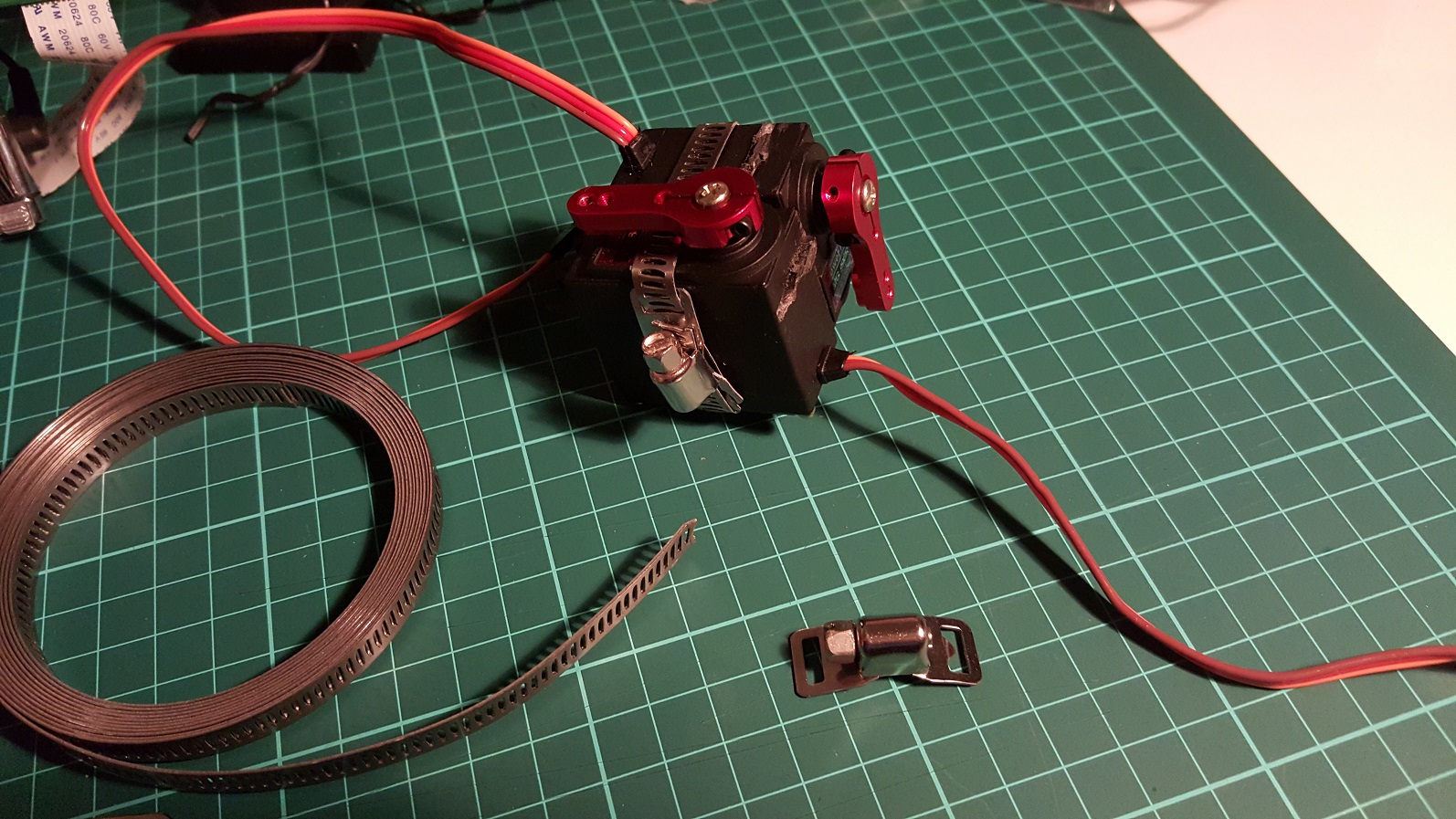
two servos attached using hose clamp
the nice thing is that the metallic band is so thin that it easily fits below the servo arm so that it can move freely.
so this is, how i built the arms of the trashbot 6, for the feet i also doubled the hinges by opening the servos:
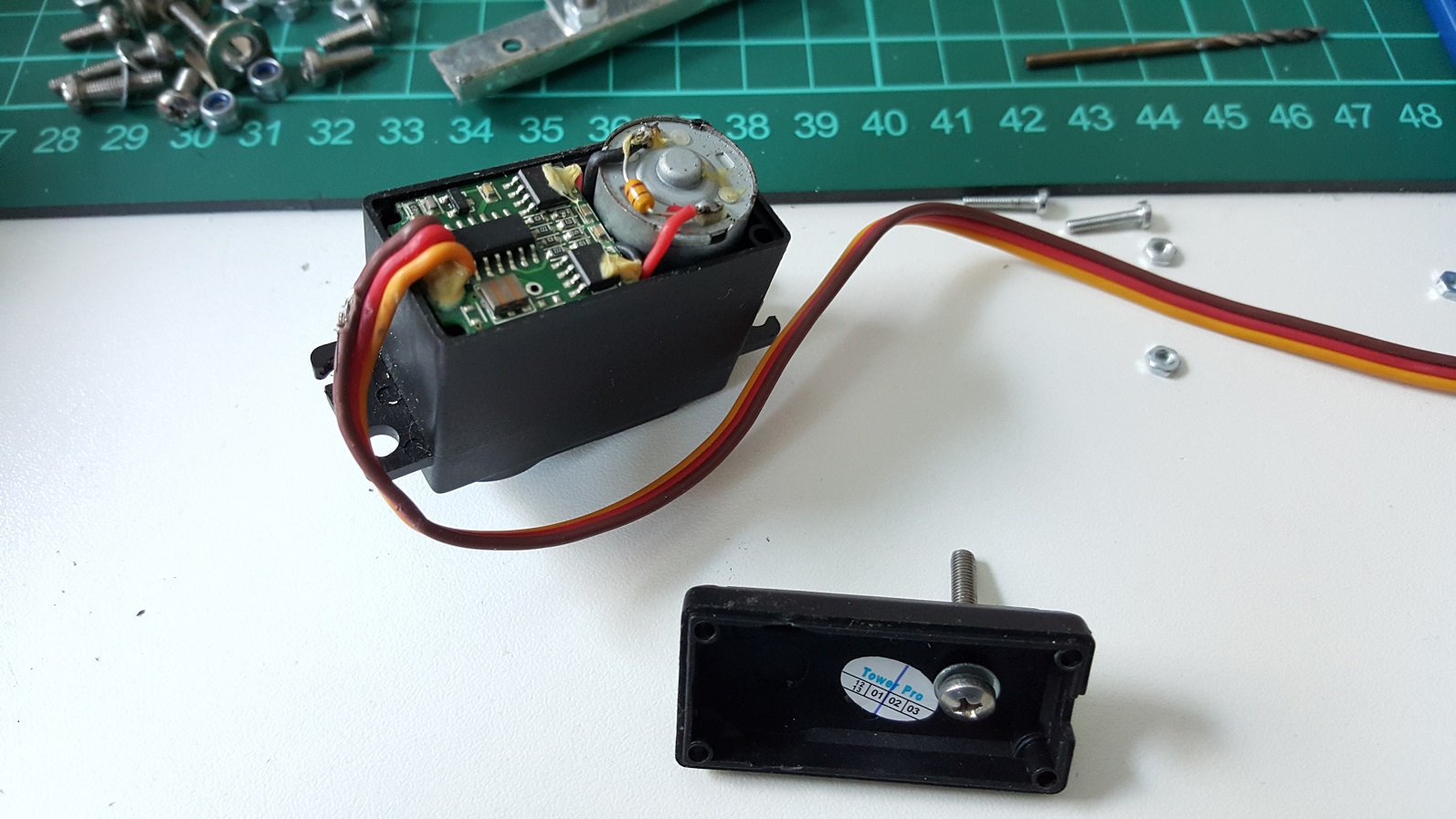
second hinge in the servo cap
luckily, the electronics pcb is a bit below the motor so that the head of the screw can hover it when the cap is put back on.
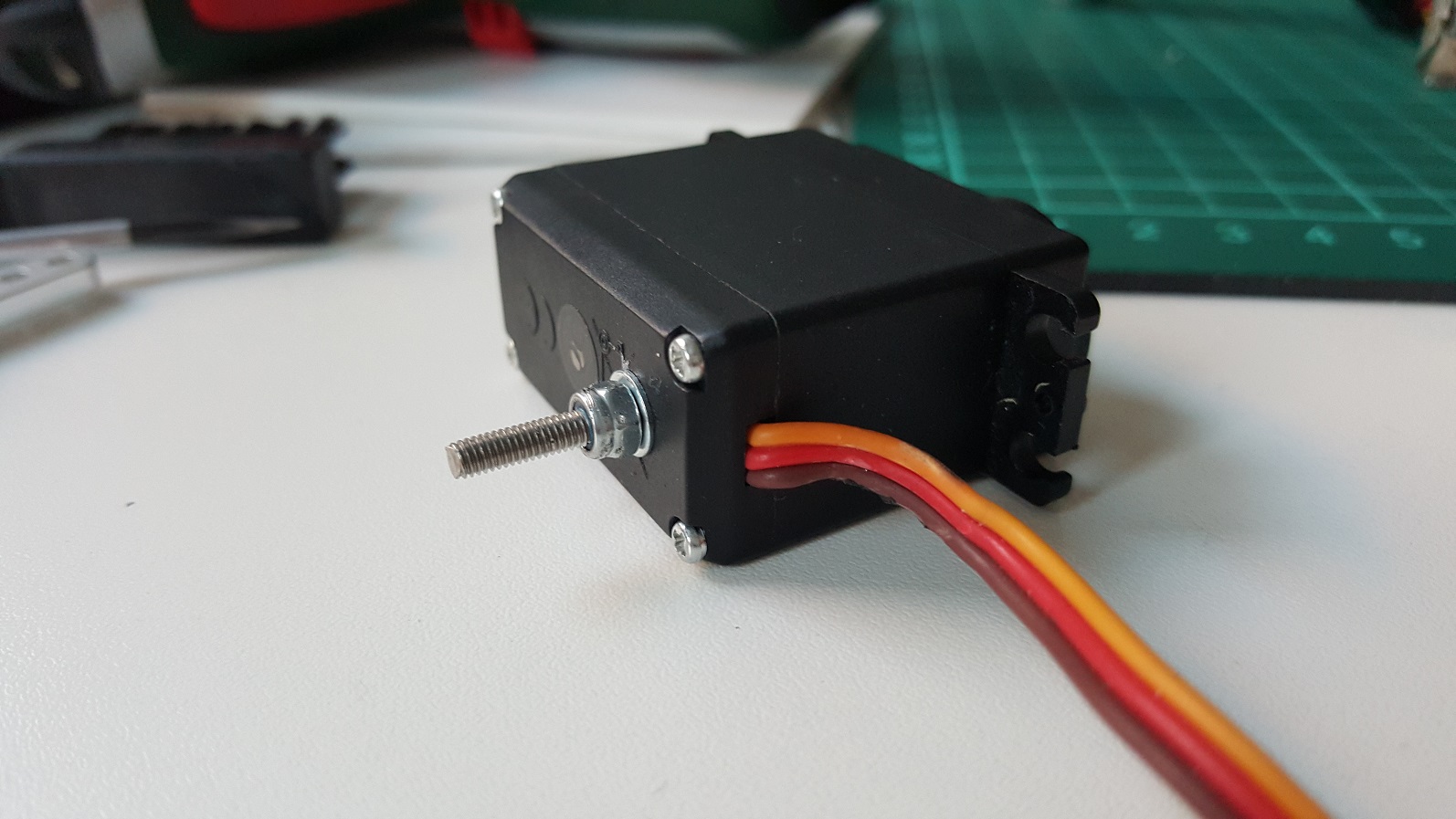
servo cap closed
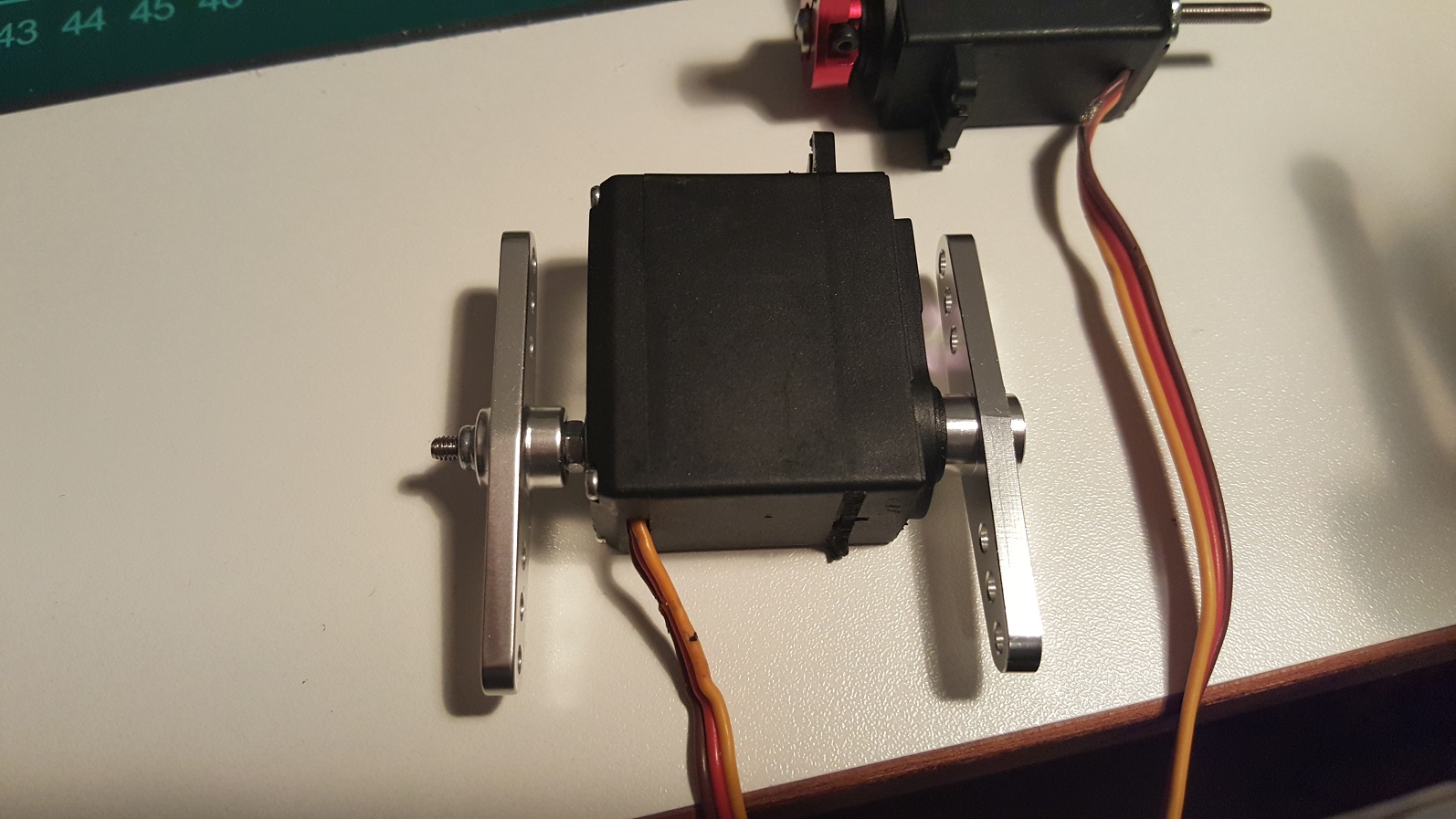
double sided servo horns on each side
so with these two simple “hacks” we added only the weight of the hose clamp and two screws to build a 2 DoF servo with double hinges. that’s ideal for a light weight and cheap robot and kind of “trashy”.
there will be more pictures with these 2 DoF “clusters” in the next post describing how i built the feed and legs…

pretty cool little trick — i’ve got a question, on the servo where you’re putting the bolt through, how does that header spin on that kind of threaded bolt, or is it suppose to be in a fixed position?
the bolt is actually a screw and it doesn’t spin since then the nut would open. i attached the servo horn in a way that it can freely move, but the screw will stay in place.
ah, ok got it.
also, could you do a setup tour video when you get the chance and upload it? showcasing your entire workbench area, and what you have made and currently making, including the trashbot? that’d be pretty neat to see!