The next iteration was of course to simply try out the wireless transmission of video. And this doesn’t make sense if you still have the camera attached to yourself, so I “augmented” another project of mine, the rover:
Arduino / RC mixed autonomy Rover
Also I did a little self-sufficient stereo video transmission pack, including the Blackbird 2 camera:
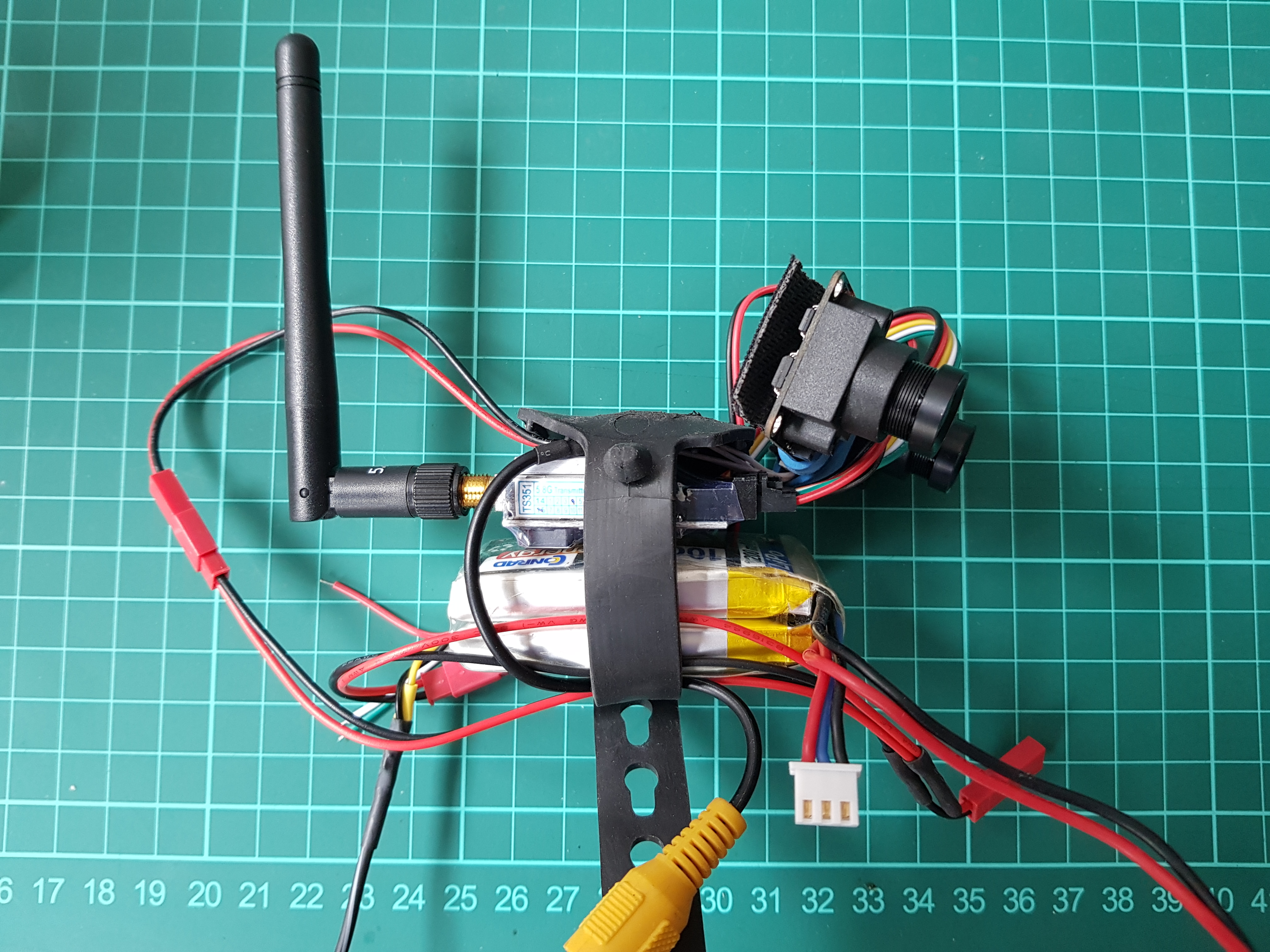
Battery, video sender, stereo camera
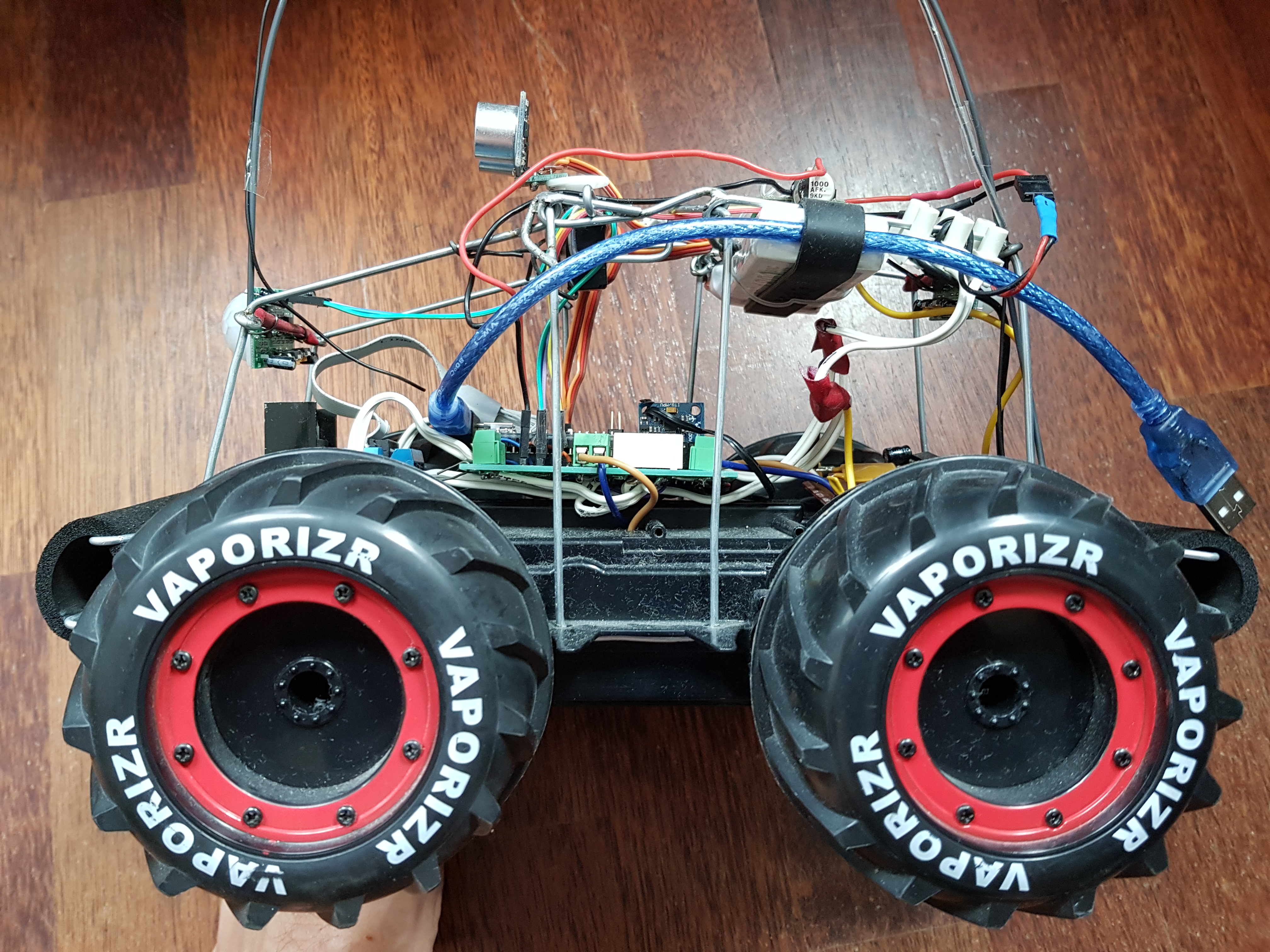
And attached the two. I love modular designs where you can recombine your projects easily. So these two simply have two batteries etc. Here’s the full setup:

Oculus Pi wireless streaming video rover setup
Here’s the video:
(Don’t know what the heck Pinnacle Studio was thinking to put the black frame around the video when exporting.)
Strange seems that we seem to get some kind of “interlace distortion” when the car is moving too quickly. I don’t quie know whether that is an artefact from the analog video transmission or from the digitisation process itself:
 When playing with this, you intuitively move your head to look around. So I could read out the head movements and send them to the Arduino on the rover to actually move the camera. I’d also need to add another servo to the camera to actually be able to move along at least two axis’. Let’s see…
When playing with this, you intuitively move your head to look around. So I could read out the head movements and send them to the Arduino on the rover to actually move the camera. I’d also need to add another servo to the camera to actually be able to move along at least two axis’. Let’s see…